L298P Shield 2A大电流双路直流电机驱动扩展板
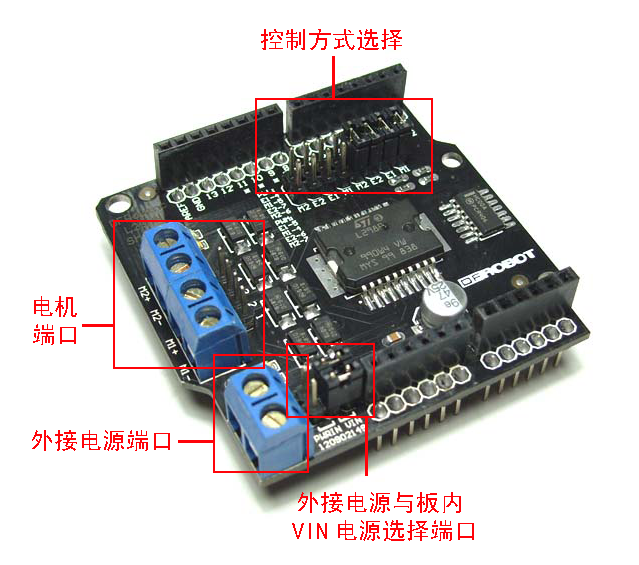
外观

简 介
- L298 Shield是Arduino兼容的一款大电流电机驱动;控制端口为4个,减少对Arduino数字端口的开销,不但起到节约控制器端口,而且控制程序也更为简单。
- 电机供电采用跳线选择Arduino VIN供电还是外接电源供电。
- L298 Shield大功率直流电机驱动器采用LGS公司优秀大功率电机专用驱动芯片L298P,可直接驱动2个直流电机,驱动电流最大达2A。
- 该电路线路布线合理、均采用贴元件片、体积小、方便安装,输出端采用高速肖特基二极管作为保护。
注意: IOREF引脚: 由于在V1.2版的设计中,添加了IOREF引脚,该引脚连接在5V口。因此,当DRI0009插在底层主控板上后,如果您的主控板的工作电压不是5V,如3.3V,建议您将DRI0009上的IOREF引脚用剪刀剪断,或者用用硬物划断PCB板上它们之间的接线,否则可能引起工作不正常或主控板烧坏等意外状况。如果主控板操作电压是5V,您可以放心使用。
产品参数
1.逻辑部分输入电压VD:5V
2.驱动部分输入电压VS:4.8~35V
3.逻辑部分工作电流Iss:≤36mA
4.驱动部分工作电流Io:≤2A
5.最大耗散功率:25W(T=75℃)
6.PWM、PLL两种驱动模式
7.控制信号输入电平:
高电平:2.3V≤Vin≤5V
低电平:-0.3V≤Vin≤1.5V
8.工作温度:-25℃~+130℃
9.驱动形式:双路大功率H桥驱动
- Arduino控制端口:数字口4,5,6,7
11.模块重量:约29g
引脚说明
- 把L298 Shield插到Arduino控制器上,程序编写也很简单, M1、M2表示2个电机;电源分别使用9V电池和电机动力电池。
注意:控制器的电源地必须和电机驱动共地。
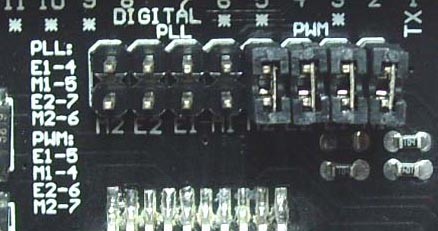
- 控制方式选择:分PWM模式和PLL模式。2种方式区别在于,PWM模式调速信号控制的是L298的 E1和E2使能端,PLL模式调速信号控制的是L298的M1和M2转向端。如下图所示,PLL和PWM都标注出了对应的控制引脚。出厂默认设置为PWM模式,短路帽在PWM端上。
- 电机端口:蓝色接线柱M1和M2分别可以接2个电机,插针1,2,3,4和蓝色接线柱功能一致。

- 外接电源端口:电机额定电压或电流大于Arduino最大输入时,可以使用外接电源单独给电机供电,VIN接电源正,GND接电源地。 控制信号真值表:
| E1 | M1 | E2 | M2 | ||
| L | X | 电机1控制禁止 | H | H | 电机2控制禁止 |
| H | H | 电机1反转 | H | H | 电机2反转 |
| H | L | 电机1正转 | H | L | 电机2正转 |
| PWM | X | 对电机1调速 | PWM | X | 对电机2调速 |
注:H表示高电平1;L表示低电平0;PWM表示脉宽调制信号;X表示任意电平。
| 引脚 | 功能 |
|---|---|
| 数字脚 4 | 电机1转动方向控制 |
| 数字脚 5 | 电机1转速控制 |
| 数字脚 6 | 电机2转速控制 |
| 数字脚 7 | 电机2转动方向控制 |
| 引脚 | 功能 |
|---|---|
| 数字脚 4 | 电机1转动控制 |
| 数字脚 5 | 电机1转动方向控制 |
| 数字脚 6 | 电机2转动方向控制 |
| 数字脚 7 | 电机2转动控制 |
使用教程
连线图
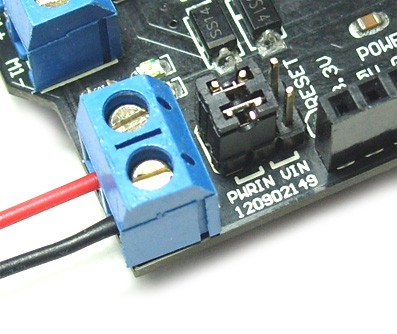
- 外接电源与板内VIN电源选择端口:当2个短路帽插到右边时(VIN),电机电源就是使用Arduino板上VIN端输入的电源,如下图。

- 当2个短路帽插到左边时(PWRIN),就使用外接电源端口输入的电源,如下图。
- 我们可以控制M1和M2两个直流电机的正转,反转,停止,以及PWM调速。
样例代码
int E1 = 5;
int M1 = 4;
int E2 = 6;
int M2 = 7;
void setup()
{
pinMode(M1, OUTPUT);
pinMode(M2, OUTPUT);
}
void loop()
{
int value;
for(value = 0 ; value <= 255; value+=5)
{
digitalWrite(M1,HIGH);
digitalWrite(M2, HIGH);
analogWrite(E1, value); //PWM调速
analogWrite(E2, value); //PWM调速
delay(30);
}
}
结果
两个电机会同时慢慢地转动起来,而且速度越来越快。到达一定速度又会停下来,然后又会像之前一样。
疑难解答
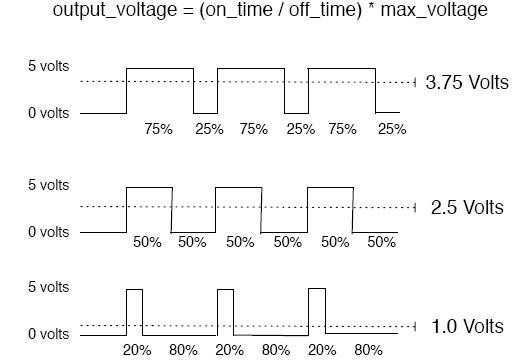
PWM调速是通过调整空占比来模拟不同电压值,从而控制加到电机两端的电压高低来实现调速。
本文整理于DFRobot wiki