L293 Shield 1A双路H桥电机驱动扩展板
概述
- Arduino控制器兼容的电机驱动扩展板,支持双路电机控制,单路最大电流可达1A。
- Arduino标准插针设计接口,可与其他扩展板模块叠层配合使用。可应用于小型移动机器人的开发。
技术规格
- 驱动芯片:L293B
- 逻辑工作电压:5V DC
- 电机驱动电压:7-12V DC
- 最大驱动电流:1A(每路)
- 电机驱动使用引脚:PIN4/5/6/7(Arduino控制器)
- 平面尺寸:56x57mm
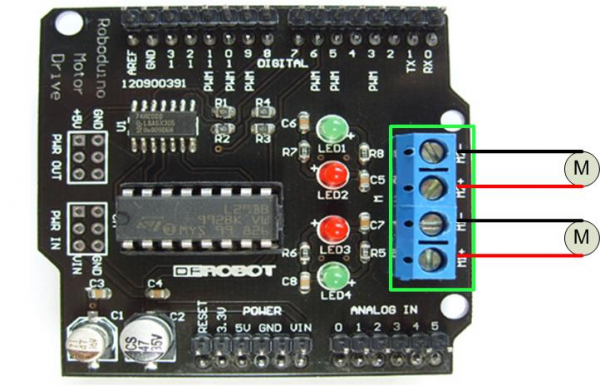
连线图
引脚分配图
| Pin | Function |
|---|---|
| Digital 4 | Motor 2 转向控制,高电平正转,低电平反转 |
| Digital 5 | Motor 2 PWM调速控制,范围0-255,0电机停转,255电机最大速度 |
| Digital 6 | Motor 1 PWM调速控制,范围0-255,0电机停转,255电机最大速度 |
| Digital 7 | Motor 1 转向控制,高电平正转,低电平反转 |
示例代码
//This motor shield use Pin 6,5,7,4 to control the motor
// Simply connect your motors to M1+,M1-,M2+,M2-
// Upload the code to Arduino/Roboduino
// Through serial monitor, type 'a','s', 'w','d','x' to control the motor
// www.dfrobot.com
// Last modified on 24/12/2009
int EN1 = 6;
int EN2 = 5; //Roboduino Motor shield uses Pin 9
int IN1 = 7;
int IN2 = 4; //Latest version use pin 4 instead of pin 8
void Motor1(int pwm, boolean reverse)
{
analogWrite(EN1,pwm); //set pwm control, 0 for stop, and 255 for maximum speed
if(reverse)
{
digitalWrite(IN1,HIGH);
}
else
{
digitalWrite(IN1,LOW);
}
}
void Motor2(int pwm, boolean reverse)
{
analogWrite(EN2,pwm);
if(reverse)
{
digitalWrite(IN2,HIGH);
}
else
{
digitalWrite(IN2,LOW);
}
}
void setup()
{
int i;
// for(i=6;i<=9;i++) //For Roboduino Motor Shield
// pinMode(i, OUTPUT); //set pin 6,7,8,9 to output mode
for(i=4;i<=7;i++) //For Arduino Motor Shield
pinMode(i, OUTPUT); //set pin 4,5,6,7 to output mode
Serial.begin(9600);
}
void loop()
{
int x,delay_en;
char val;
while(1)
{
val = Serial.read();
if(val!=-1)
{
switch(val)
{
case 'w'://Move ahead
Motor1(100,true); //You can change the speed, such as Motor(50,true)
Motor2(100,true);
break;
case 'x'://move back
Motor1(100,false);
Motor2(100,false);
break;
case 'a'://turn left
Motor1(100,false);
Motor2(100,true);
break;
case 'd'://turn right
Motor1(100,true);
Motor2(100,false);
break;
case 's'://stop
Motor1(0,false);
Motor2(0,false);
break;
}
}
}
}
本文整理于DFRobot wiki