NO.8 模型用GPS测速仪(已完成)(更新第二版本)
code_asf 于 2014-2-24 12:01 编辑
因为MEGA328处理能力有限,不能同时做测速跟记录功能。所以要分开处理。先以最小系统放到飞机上进行记录。落地后才对GPS记录进行分析。
原代码在本楼底部
原理图在地板
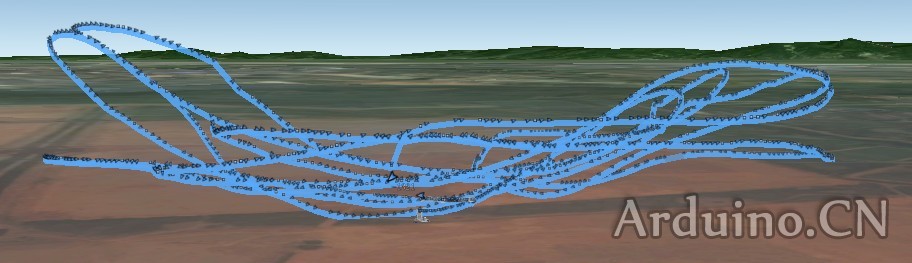
7楼为GPS数据在GOOGLE EARTH里显示
8楼视频
功能部分已完成,剩下就是两个功能集成和菜单处理。
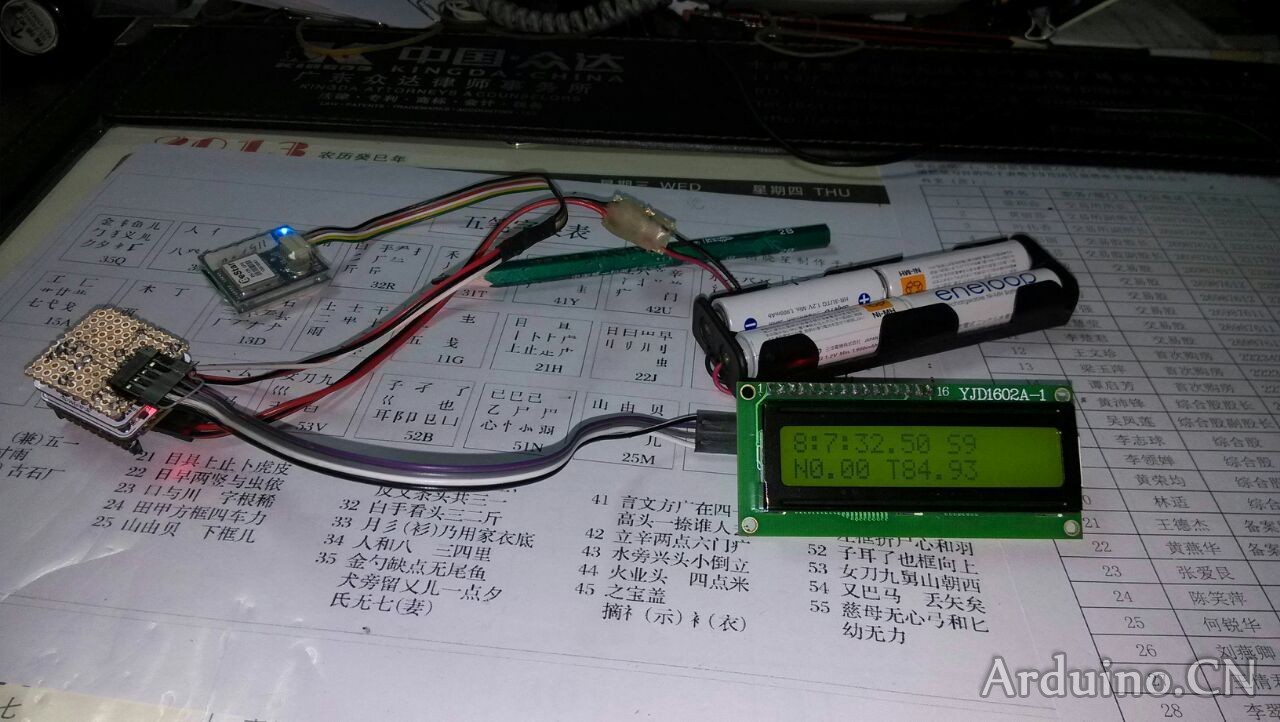
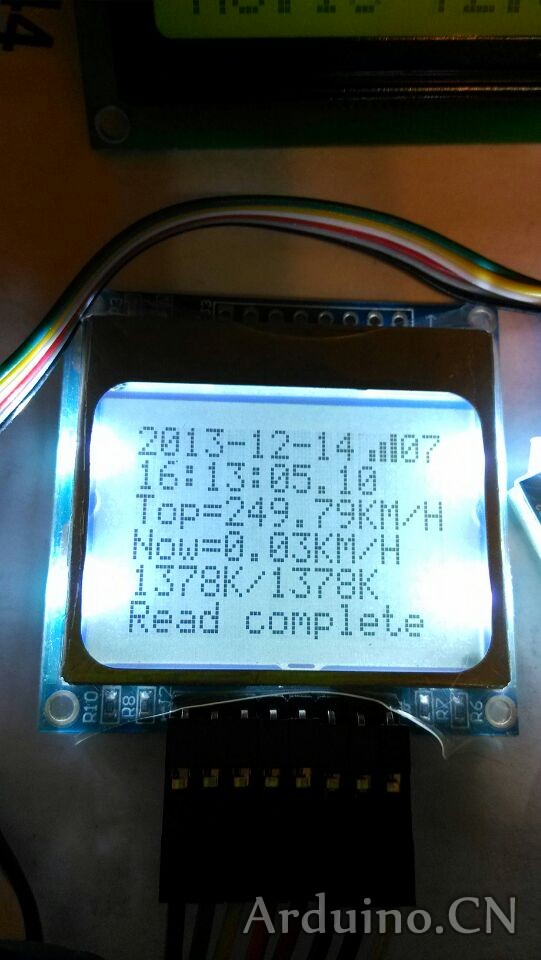
图中第一行为时间和卫星数。第二行N为当时时速 T为最高时速。


先上google earth 图跟GPS记录。因为视频未有ID,要等周未重拍
算是完成了
用法:接上电池,接上1602显示屏,将D2跟地连接为显示模式。
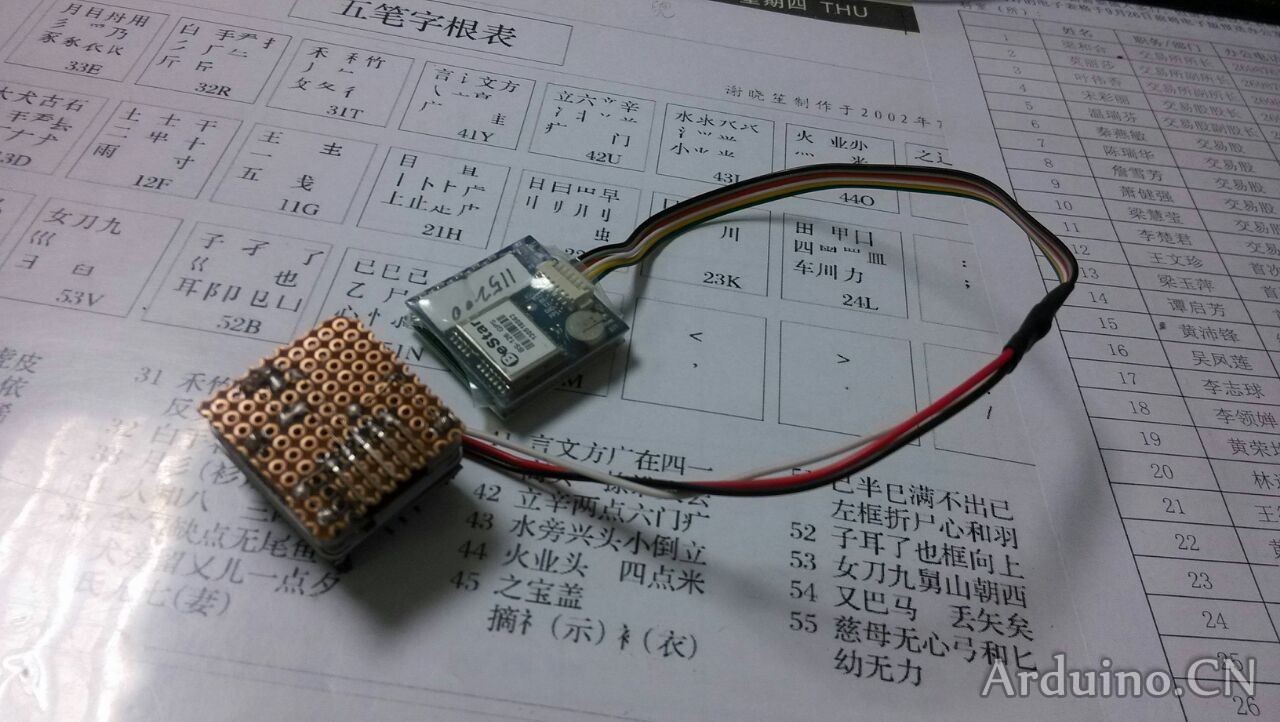
将电池跟屏幕拆掉,将D2悬空。为记录模式。这时可以装到飞机上,用BEC供电即可。
=======================分 隔 线====================
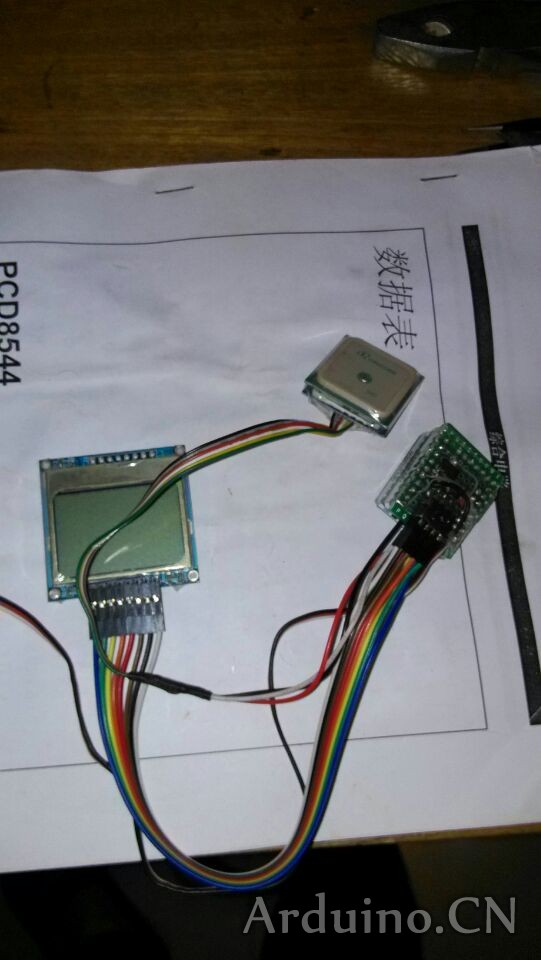
过年时重新对测速仪优化了下。原来处理速度慢不是MEGA328问题,而是要等显示屏显示完再处理。
在新程序里,算10次数据再显示。而且5110屏显示速度比IIC 1602快很多。所以整体速度提升了一倍有多。
基本原理一样,原理图就不上了,就是找几个口接显示屏就可以。
程序代码这里


新版的处理视频,有与旧版做对比
via - arduino中文社区