RoMeo BLE mini控制器V1.0
<img alt="" src="http://images.ncnynl.com/arduino/2016/300px-DFR0351_RoMeo_BLE_mini.jpg" width="300" height="300" class="thumbimage" /> <img src="http://images.ncnynl.com/arduino/2016/magnify-clip.png" width="15" height="11" alt="" />RoMeo BLE mini控制器V1.0
目录
1 概 述
2 性能描述
3 控制器丝印说明
4 RoMeo BLE mini应用示例
5 RoMeo BLE mini手机连接示例
6 通过BLE进行无线编程
7 通过AT指令配置BLE设备
8 升级RoMeo BLE mini上的BLE固件(AT+VERSION查询版本)
9 ICSP接口说明
10 更多
概 述
RoMeo BLE mini控制器是RoMeo BLE控制器的微型版。在继承了RoMeo BLE所有功能的同时,具备了更小的尺寸。可以说是博采众长,集各大主控板的优点为一体。具备8路数字接口及4路模拟接口,可满足多路舵机控制及数字量的输入输出。 自带的两路1.5A电机驱动,可以使它轻松带起小型移动平台,满足绝大部分小型机器人的应用开发。集成的蓝牙4.0无线通信模块,也使其拥有了无线通讯和无线编程的功能。这将是各大爱好者又一大好伙伴。
性能描述
BLE芯片:TI CC2540
传输距离:空旷地带50m
支持通过usb更新BLE芯片程序
支持蓝牙远程更新Arduino程序
支持蓝牙HID
支持AT指令配置BLE
支持串口透传
支持主从机切换
微处理器:ATmega328P
引导装载程序:Arduino UNO
8 通道数字 I/O
2 PWM 通道 (Pin11,Pin10)
4通道模拟输入
USB接口
自动切换输入电源
ICSP下载程序接口
串行接口TTL电平
具有I2C接口
2路1.5A电流的H桥电机驱动接口
尺寸:45x38.5mm
控制器丝印说明
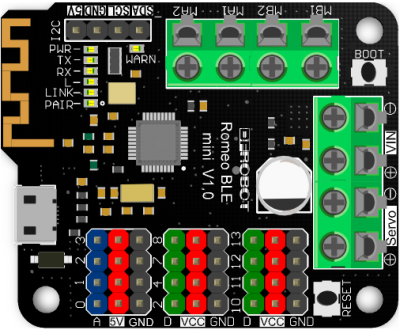
![]() Romeo BLE mini正面示意图
Romeo BLE mini正面示意图
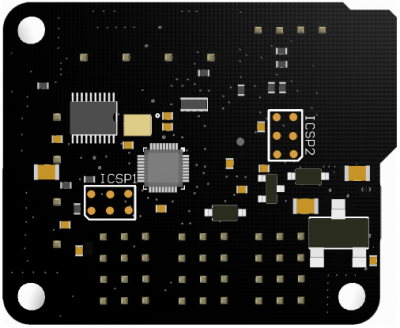
![]() Romeo BLE mini反面示意图
Romeo BLE mini反面示意图
丝印
说明
+VIN—
电机驱动外接电源和控制器外接电源;+(正极)6.5~10V;-(负极)接地
+Servo—
数字口电源输入5~20V
MA1 MA2/MB1 MB2
2路电机控制端;MA1(PIN3) MA2(PIN5) MB1(PIN9) MB2(PIN6)
I2C
I2C接口:SDA SCL GND 5V
A 5V GND
标准模拟接口;A(蓝色)模拟口0,1,2,3;5V(红色)电源正极;GND(黑色)电源负极
D VCC GND
标准数字接口;D(绿色)数字口2,4,7,8,10(pwm),11(pwm),12,13;VCC(红色)电源正极(当Servo端口未接电源时VCC为5V,当Servo端口接上电源时VCC为Servo端的输入电源);GND(黑色)电源负极
LED指示灯
PWR 电源指示灯;TX 发送数据指示灯;RX 接收数据指示灯;L D13信号指示灯;LINK 蓝牙连接指示灯;PAIR 蓝牙配对指示灯;WARN 电机驱动芯片警告指示灯(当温度过高或电流过大亮,未接电机时微亮)
RESET
控制器复位按键
BOOT
蓝牙固件更新按键
RoMeo BLE mini应用示例
小伙伴们可以参考这个简单的应用做你的机器人,先介绍下这个应用吧:用到的是Romeo BLE mini控制器一个,小马达2个(不建议使用10V以上电机),电池一个。下面是实物连接图。
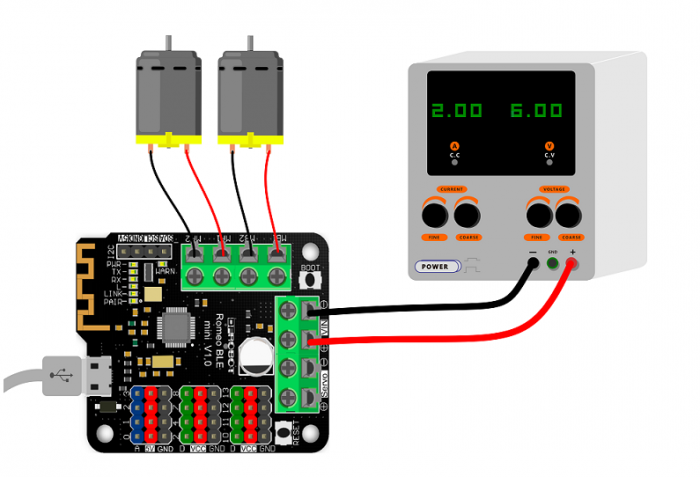
![]() 硬件连接图
硬件连接图
此程序通过串口接收命令来控制小车。
戳这里下载Romeo BLE mini库文件
#include <Romeo_m.h>
void setup(void)
{
Romeo_m.Initialise();
Serial.begin(115200); //set serial bandrate 115200
}
void loop(void)
{
char val=0;
if(Serial.available()>0){
val = Serial.read();
}
switch(val){
case 'a'://forward
Romeo_m.motorControl(Forward,100,Forward,100);
break;
case'b'://backward
Romeo_m.motorControl(Reverse,100,Reverse,100);
break;
case'c'://turn left
Romeo_m.motorControl(Forward,100,Reverse,100);
break;
case'd'://turn right
Romeo_m.motorControl(Reverse,100,Forward,100);
break;
case'e'://stop
Romeo_m.motorStop();
break;
default: break;
}
}
RoMeo BLE mini手机连接示例
RoMeo BLE mini的手机连接示例请参考Bluno 手机连接示例
通过BLE进行无线编程
RoMeo BLE mini 无线编程下载请参考Bluno 无线编程下载
通过AT指令配置BLE设备
RoMeo BLE mini AT 命令的配置方式也与Bluno相同,请参考Bluno AT 命令表
升级RoMeo BLE mini上的BLE固件(AT+VERSION查询版本)
RoMeo BLE mini升级固件的方法和BLUNO相似,
请参考BLUNO的Wiki中"升级BLUNO上的BLE固件"章节
ICSP接口说明
ICSP接口说明如图:
请注意,为方便布线,ICSP的接口已发生了改变!

![]() RoMeo BLE mini-ICSP接口
RoMeo BLE mini-ICSP接口
ICSP1 Atmega328p
ICSP2 CC2540
更多
Romeo BLE mini库文件
Romeo BLE mini原理图
![]() 购买 RoMeo BLE mini控制器V1.0 (SKU:DFR0351)
购买 RoMeo BLE mini控制器V1.0 (SKU:DFR0351)