TELEMATICS LCD SHIELD V1.0
<img alt="" src="http://images.ncnynl.com/arduino/2016/Lcd-obd.png" width="279" height="466" class="thumbimage" /> <img src="http://images.ncnynl.com/arduino/2016/magnify-clip.png" width="15" height="11" alt="" />DFR0355 TELEMATICS LCD SHIELD V1.0
目录
1 概 述
2 技术规格
3 接口示意图
4 使用教程
5 更多
概 述
TELEMATICS LCD SHIELD是DFRobot最新开发的一款针对MEGA主板接口的LCD显示板。
该Shield显示板包括了SPI通信的SD接口,三个串口接口,以及一个IIC接口。完全支持Mega1280、Mega2560。
接口示意图
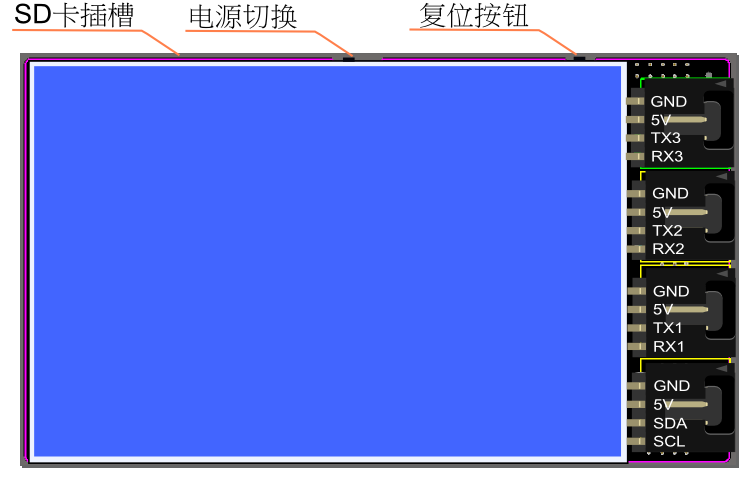
1 SD卡插槽
如图所示位置,SD卡插槽位于LCD背面,不影响美观(主板背面有详细的标注)。
2 电源切换开关
如图所示位置,切换开关位于LCD背面,不影响美观,背面有明确的丝印表示,主要用于切换触摸芯片的电源,当主芯片使用3.3V供电时切换到3.3V端(主板背面有详细的标注)。
3 复位按钮
如图所示位置,复位按钮位于LCD背面,不影响美观,背面有明确的丝印表示,主要用于复位主芯片(主板背面有详细的标注)。
4 扩展接口
如图所示位置,其他扩展接口位于LCD背面,不影响美观,背面有明确的丝印表示,其中包括串口1~3,IIC接口(主板背面有详细的标注)。
使用教程
请先下载TELEMATICS LCD SHIELD相关库文件并安装库文件。点击下载
将下载的所有库文件安装导入到你的编译器下面,即可使用
注意:megalogger.rar是应用程序,不属于库文件。
/*************************************************************************
- Reference code for OBD-II/GPS/9-Axis Data Logger
- Works with Freematics OBD-II Telematics Advanced Kit
- Visit http://freematics.com for more information
- Distributed under GPL v2.0
- Written by Stanley Huang <stanleyhuangyc@gmail.com>
*************************************************************************/
#include <Arduino.h>
#include <Wire.h>
#include <OBD.h>
#include <SPI.h>
#include <MultiLCD.h>
#include <TinyGPS.h>
#include <I2Cdev.h>
#include <MPU9150.h>
#include "config.h"
#if ENABLE_DATA_LOG
#include <SD.h>
#endif
#include "Narcoleptic.h"
#include "images.h"
#if ENABLE_DATA_OUT && USE_SOFTSERIAL
#include <SoftwareSerial.h>
#endif
#include "datalogger.h"
// logger states
#define STATE_SD_READY 0x1
#define STATE_OBD_READY 0x2
#define STATE_GPS_CONNECTED 0x4
#define STATE_GPS_READY 0x8
#define STATE_MEMS_READY 0x10
#define STATE_GUI_ON 0x20
// adapter type
#define OBD_ADAPTER_I2C 0
#define OBD_ADAPTER_UART 1
#if USE_GPS
// GPS logging can only be enabled when there is additional hardware serial UART
#define GPSUART Serial2
TinyGPS gps;
#endif
#if USE_MPU6050 || USE_MPU9150
MPU6050 accelgyro;
static uint32_t lastMemsDataTime = 0;
#endif
static uint8_t lastFileSize = 0;
static uint32_t lastRefreshTime = 0;
static uint32_t distance = 0;
static uint32_t startTime = 0;
static uint16_t lastSpeed = 0;
static uint32_t lastSpeedTime = 0;
static uint32_t gpsDate = 0;
static uint32_t obdTime = 0;
static uint8_t obdCount = 0;
#if USE_GPS
static uint32_t lastGPSDataTime = 0;
static int gpsSpeed = -1;
#endif
static const byte PROGMEM pidTier1[]= {PID_RPM, PID_SPEED, PID_ENGINE_LOAD, PID_THROTTLE};
static const byte PROGMEM pidTier2[] = {PID_INTAKE_MAP, PID_MAF_FLOW, PID_TIMING_ADVANCE};
static const byte PROGMEM pidTier3[] = {PID_COOLANT_TEMP, PID_INTAKE_TEMP, PID_AMBIENT_TEMP, PID_ENGINE_FUEL_RATE};
#define TIER_NUM1 sizeof(pidTier1)
#define TIER_NUM2 sizeof(pidTier2)
#define TIER_NUM3 sizeof(pidTier3)
byte state = 0;
void processAccelerometer();
void processGPS();
CDataLogger logger;
class CMyOBD : public COBD
{
public:
void dataIdleLoop()
{
if (!(state & STATE_GUI_ON)) return;
if (state & STATE_MEMS_READY) {
processAccelerometer();
}
#if USE_GPS
uint32_t t = millis();
while (GPSUART.available() && millis() - t < MAX_GPS_PROCESS_TIME) {
processGPS();
}
#endif
}
};
class CMyOBDI2C : public COBDI2C
{
public:
void dataIdleLoop()
{
if (!(state & STATE_GUI_ON)) return;
if (state & STATE_MEMS_READY) {
processAccelerometer();
}
#if USE_GPS
uint32_t t = millis();
while (GPSUART.available() && millis() - t < MAX_GPS_PROCESS_TIME) {
processGPS();
}
#endif
}
};
#if OBD_ADAPTER_MODEL == OBD_MODEL_I2C
CMyOBDI2C obd;
#else
CMyOBD obd;
#endif
void setColorByValue(int value, int threshold1, int threshold2, int threshold3)
{
if (value < 0) value = -value;
if (value < threshold1) {
lcd.setColor(RGB16_WHITE);
} else if (value < threshold2) {
byte n = (uint32_t)(threshold2 - value) * 255 / (threshold2 - threshold1);
lcd.setColor(255, 255, n);
} else if (value < threshold3) {
byte n = (uint32_t)(threshold3 - value) * 255 / (threshold3 - threshold2);
lcd.setColor(255, n, 0);
} else {
lcd.setColor(255, 0, 0);
}
}
void showPIDData(byte pid, int value)
{
char buf[8];
switch (pid) {
case PID_RPM:
lcd.setFontSize(FONT_SIZE_XLARGE);
lcd.setCursor(32, 6);
if (value >= 10000) break;
setColorByValue(value, 2500, 3500, 5000);
lcd.printInt(value, 4);
break;
case PID_SPEED:
if (value < 1000) {
lcd.setFontSize(FONT_SIZE_XLARGE);
lcd.setCursor(50, 2);
setColorByValue(value, 60, 100, 160);
lcd.printInt(value, 3);
#if USE_GPS
if (gpsSpeed != -1) {
lcd.setFontSize(FONT_SIZE_SMALL);
lcd.setCursor(110, 2);
lcd.setColor(RGB16_YELLOW);
int diff = gpsSpeed - value;
if (diff >= 0) {
lcd.write('+');
lcd.printInt(diff);
} else {
lcd.write('-');
lcd.printInt(-diff);
}
lcd.write(' ');
}
#endif
}
break;
case PID_ENGINE_LOAD:
lcd.setFontSize(FONT_SIZE_XLARGE);
lcd.setCursor(50, 10);
if (value >= 100) value = 99;
setColorByValue(value, 75, 80, 100);
lcd.printInt(value, 3);
break;
case PID_THROTTLE:
lcd.setFontSize(FONT_SIZE_MEDIUM);
lcd.setCursor(92, 21);
if (value >= 100) value = 99;
setColorByValue(value, 50, 75, 100);
lcd.printInt(value, 2);
break;
case PID_ENGINE_FUEL_RATE:
if (value < 100) {
lcd.setFontSize(FONT_SIZE_MEDIUM);
lcd.setCursor(92, 24);
lcd.printInt(value, 2);
}
break;
case PID_INTAKE_TEMP:
if (value >= 0 && value < 100) {
lcd.setFontSize(FONT_SIZE_MEDIUM);
lcd.setCursor(92, 27);
lcd.printInt(value, 2);
}
break;
}
lcd.setColor(RGB16_WHITE);
}
void ShowVoltage(float v)
{
lcd.setFontSize(FONT_SIZE_LARGE);
lcd.setCursor(84, 18);
lcd.setFontSize(FONT_SIZE_MEDIUM);
lcd.print(v);
}
void fadeOutScreen()
{
// fade out backlight
for (int n = 254; n >= 0; n--) {
lcd.setBackLight(n);
delay(5);
}
}
void fadeInScreen()
{
for (int n = 1; n <= 255; n++) {
lcd.setBackLight(n);
delay(10);
}
}
void initScreen()
{
lcd.clear();
lcd.draw4bpp(frame0[
lcd.setColor(RGB16_CYAN);
lcd.setFontSize(FONT_SIZE_SMALL);
lcd.setCursor(110, 4);
lcd.print("km/h");
lcd.setCursor(110, 8);
lcd.print("RPM");
lcd.setCursor(110, 11);
lcd.print("ENGINE");
lcd.setCursor(110, 12);
lcd.print("LOAD %");
//lcd.setFont(FONT_SIZE_MEDIUM);
lcd.setColor(RGB16_CYAN);
lcd.setCursor(184, 2);
lcd.print("ELAPSED:");
lcd.setCursor(184, 5);
lcd.print("DISTANCE: km");
lcd.setCursor(184, 8);
lcd.print("AVG SPEED: kph");
lcd.setCursor(184, 11);
lcd.print("ALTITUDE: m");
lcd.setCursor(18, 18);
lcd.print("BATTERY: V");
lcd.setCursor(18, 21);
lcd.print("THROTTLE:  %");
lcd.setCursor(18, 24);
lcd.print("FUEL RATE: L/h");
lcd.setCursor(18, 27);
lcd.print("INTAKE: C");
lcd.setCursor(184, 18);
lcd.print("UTC:");
lcd.setCursor(184, 19);
lcd.print("LAT:");
lcd.setCursor(280, 19);
lcd.print("SAT:");
lcd.setCursor(184, 20);
lcd.print("LON:");
lcd.setFontSize(FONT_SIZE_SMALL);
lcd.setCursor(184, 22);
lcd.print("ACC:");
lcd.setCursor(184, 23);
lcd.print("GYR:");
lcd.setCursor(184, 24);
lcd.print("MAG:");
lcd.setCursor(184, 26);
lcd.print("OBD FREQ:");
lcd.setCursor(184, 27);
lcd.print("GPS FREQ:");
lcd.setCursor(184, 28);
lcd.print("LOG SIZE:");
//lcd.setColor(0xFFFF);
/*
lcd.setCursor(32, 4);
lcd.print("%");
lcd.setCursor(68, 5);
lcd.print("Intake Air");
lcd.setCursor(112, 4);
lcd.print("C");
*/
state |= STATE_GUI_ON;
fadeInScreen();
}
#if ENABLE_DATA_LOG
bool checkSD()
{
Sd2Card card;
SdVolume volume;
state &= ~STATE_SD_READY;
pinMode(SS, OUTPUT);
lcd.setFontSize(FONT_SIZE_MEDIUM);
if (card.init(SPI_HALF_SPEED, SD_CS_PIN)) {
const char* type;
switch(card.type()) {
case SD_CARD_TYPE_SD1:
type = "SD1";
break;
case SD_CARD_TYPE_SD2:
type = "SD2";
break;
case SD_CARD_TYPE_SDHC:
type = "SDHC";
break;
default:
type = "SDx";
}
lcd.print(type);
lcd.write(' ');
if (!volume.init(card)) {
lcd.print("No FAT!");
return false;
}
uint32_t volumesize = volume.blocksPerCluster();
volumesize >>= 1; // 512 bytes per block
volumesize *= volume.clusterCount();
volumesize >>= 10;
lcd.print((int)volumesize);
lcd.print("MB");
} else {
lcd.println("No SD Card");
return false;
}
if (!SD.begin(SD_CS_PIN)) {
lcd.println("Bad SD");
return false;
}
state |= STATE_SD_READY;
return true;
}
#endif
#if USE_GPS
void processGPS()
{
// process GPS data
char c = GPSUART.read();
if (!gps.encode(c))
return;
// parsed GPS data is ready
uint32_t time;
uint32_t date;
logger.dataTime = millis();
gps.get_datetime(&date, &time, 0);
if (date != gpsDate) {
// log date only if it's changed and valid
int year = date % 100;
if (date < 1000000 && date >= 10000 && year >= 15 && (gpsDate == 0 || year - (gpsDate % 100) <= 1)) {
logger.logData(PID_GPS_DATE, (int32_t)date);
gpsDate = date;
}
}
logger.logData(PID_GPS_TIME, (int32_t)time);
int32_t lat, lon;
gps.get_position(&lat, &lon, 0);
byte sat = gps.satellites();
// show GPS data interval
lcd.setFontSize(FONT_SIZE_SMALL);
if (lastGPSDataTime) {
lcd.setCursor(242, 27);
lcd.printInt((uint16_t)logger.dataTime - lastGPSDataTime);
lcd.print("ms");
lcd.printSpace(2);
}
// keep current data time as last GPS time
lastGPSDataTime = logger.dataTime;
// display UTC date/time
lcd.write(' ');
lcd.setCursor(214, 18);
lcd.setFlags(FLAG_PAD_ZERO);
lcd.printLong(date, 6);
lcd.write(' ');
lcd.printLong(time, 8);
// display latitude
lcd.setCursor(214, 19);
lcd.print(lat / 100000);
lcd.write('.');
lcd.printLong(abs(lat) % 100000, 5);
// display longitude
lcd.setCursor(214, 20);
lcd.print(lon / 100000);
lcd.write('.');
lcd.printLong(abs(lon) % 100000, 5);
// log latitude/longitude
logger.logData(PID_GPS_LATITUDE, lat);
logger.logData(PID_GPS_LONGITUDE, lon);
// display number of satellites
if (sat < 100) {
lcd.setCursor(280, 20);
lcd.printInt(sat);
lcd.write(' ');
}
// display altitude
int32_t alt = gps.altitude();
lcd.setFlags(0);
if (alt > -1000000 && alt < 1000000) {
lcd.setFontSize(FONT_SIZE_MEDIUM);
lcd.setCursor(250, 11);
lcd.print(alt / 100);
lcd.write(' ');
// log altitude
logger.logData(PID_GPS_ALTITUDE, (int)(alt / 100));
}
// only log these data when satellite status is good
if (sat >= 3) {
gpsSpeed = gps.speed() * 1852 / 100000;
logger.logData(PID_GPS_SPEED, gpsSpeed);
}
}
#endif
void processAccelerometer()
{
#if USE_MPU6050 || USE_MPU9150
int16_t ax, ay, az;
int16_t gx, gy, gz;
#if USE_MPU9150
int16_t mx, my, mz;
#endif
int temp;
if (logger.dataTime - lastMemsDataTime < ACC_DATA_INTERVAL) {
return;
}
#if USE_MPU9150
accelgyro.getMotion9(&ax, &ay, &az, &gx, &gy, &gz, &mx, &my, &mz);
#else
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
#endif
logger.dataTime = millis();
temp = accelgyro.getTemperature();
ax /= ACC_DATA_RATIO;
ay /= ACC_DATA_RATIO;
az /= ACC_DATA_RATIO;
gx /= GYRO_DATA_RATIO;
gy /= GYRO_DATA_RATIO;
gz /= GYRO_DATA_RATIO;
#if USE_MPU9150
mx /= COMPASS_DATA_RATIO;
my /= COMPASS_DATA_RATIO;
mz /= COMPASS_DATA_RATIO;
#endif
// display MEMS data
lcd.setFontSize(FONT_SIZE_SMALL);
lcd.setCursor(214, 22);
setColorByValue(ax, 50, 100, 200);
lcd.print(ax);
setColorByValue(ay, 50, 100, 200);
lcd.write('/');
lcd.print(ay);
setColorByValue(az, 50, 100, 200);
lcd.write('/');
lcd.print(az);
lcd.printSpace(8);
// display gyro data
lcd.setCursor(214, 23);
lcd.setColor(RGB16_WHITE);
lcd.print(gx);
lcd.write('/');
lcd.print(gy);
lcd.write('/');
lcd.print(gz);
lcd.printSpace(8);
#if USE_MPU9150
// display compass data
lcd.setCursor(214, 24);
lcd.setColor(RGB16_WHITE);
lcd.print(mx);
lcd.write('/');
lcd.print(my);
lcd.write('/');
lcd.print(mz);
lcd.printSpace(8);
#endif
// log x/y/z of accelerometer
logger.logData(PID_ACC, ax, ay, az);
// log x/y/z of gyro meter
logger.logData(PID_GYRO, gx, gy, gz);
#if USE_MPU9150
// log x/y/z of compass
logger.logData(PID_COMPASS, mx, my, mz);
#endif
logger.logData(PID_MEMS_TEMP, temp);
lastMemsDataTime = logger.dataTime;
#endif
}
void logOBDData(byte pid)
{
char buffer[OBD_RECV_BUF_SIZE];
uint32_t start = millis();
int value;
// send query for OBD-II PID
obd.sendQuery(pid);
// let PID parsed from response
pid = 0;
// read responded PID and data
if (!obd.getResult(pid, value)) {
return;
}
logger.dataTime = millis();
if (obdCount == 255) {
obdTime = 0;
obdCount = 0;
}
obdTime += logger.dataTime - start;
obdCount++;
// display data
showPIDData(pid, value);
// log data to SD card
logger.logData(0x100 | pid, value);
if (pid == PID_SPEED) {
// estimate distance travelled since last speed update
distance += (uint32_t)(value + lastSpeed) * (logger.dataTime - lastSpeedTime) / 6000;
// display speed
lcd.setFontSize(FONT_SIZE_MEDIUM);
lcd.setCursor(250, 5);
lcd.printInt(distance / 1000);
lcd.write('.');
lcd.printInt(((uint16_t)distance % 1000) / 100);
// calculate and display average speed
int avgSpeed = (unsigned long)distance * 3600 / (millis() - startTime);
lcd.setCursor(250, 8);
lcd.printInt(avgSpeed);
lastSpeed = value;
lastSpeedTime = logger.dataTime;
}
#if ENABLE_DATA_LOG
// flush SD data every 1KB
if ((logger.dataSize >> 10) != lastFileSize) {
logger.flushFile();
// display logged data size
lcd.setFontSize(FONT_SIZE_SMALL);
lcd.setCursor(242, 28);
lcd.print((unsigned int)(logger.dataSize >> 10));
lcd.print("KB");
lastFileSize = logger.dataSize >> 10;
}
#endif
// if OBD response is very fast, go on processing other data for a while
#ifdef OBD_MIN_INTERVAL
while (millis() - start < OBD_MIN_INTERVAL) {
obd.dataIdleLoop();
}
#endif
}
void showECUCap()
{
static const byte PROGMEM pidlist[] = {PID_ENGINE_LOAD, PID_COOLANT_TEMP, PID_FUEL_PRESSURE, PID_INTAKE_MAP, PID_RPM, PID_SPEED, PID_TIMING_ADVANCE, PID_INTAKE_TEMP, PID_MAF_FLOW, PID_THROTTLE, PID_AUX_INPUT,
PID_EGR_ERROR, PID_COMMANDED_EVAPORATIVE_PURGE, PID_FUEL_LEVEL, PID_CONTROL_MODULE_VOLTAGE, PID_ABSOLUTE_ENGINE_LOAD, PID_AMBIENT_TEMP, PID_COMMANDED_THROTTLE_ACTUATOR, PID_ETHANOL_FUEL,
PID_FUEL_RAIL_PRESSURE, PID_HYBRID_BATTERY_PERCENTAGE, PID_ENGINE_OIL_TEMP, PID_FUEL_INJECTION_TIMING, PID_ENGINE_FUEL_RATE, PID_ENGINE_TORQUE_DEMANDED, PID_ENGINE_TORQUE_PERCENTAGE};
lcd.setFontSize(FONT_SIZE_SMALL);
lcd.setColor(RGB16_WHITE);
for (byte i = 0, n = 4; i < sizeof(pidlist) / sizeof(pidlist[0]); i++) {
byte pid = pgm_read_byte(pidlist + i);
if (obd.isValidPID(pid)) {
lcd.setCursor(252, n++);
lcd.write('0');
lcd.print((int)pid | 0x100, HEX);
}
}
int values[sizeof(pidlist)];
bool scanned = false;
for (uint32_t t = millis(); millis() - t < GUI_PID_LIST_DURATION * 1000; ) {
for (byte i = 0, n = 4; i < sizeof(pidlist) / sizeof(pidlist[0]); i++) {
byte pid = pgm_read_byte(pidlist + i);
if (obd.isValidPID(pid)) {
int value;
lcd.setCursor(280 , n++);
if (obd.read(pid, value)) {
if (!scanned || value == values[i])
lcd.setColor(RGB16_CYAN);
else if (value > values[i])
lcd.setColor(RGB16_GREEN);
else
lcd.setColor(RGB16_RED);
byte n = lcd.print(value);
for (; n < 4; n++) lcd.print(' ');
values[i] = value;
} else {
lcd.setColor(RGB16_YELLOW);
lcd.print("N/A");
}
}
}
scanned = true;
}
}
void reconnect()
{
fadeOutScreen();
#if ENABLE_DATA_LOG
logger.closeFile();
#endif
lcd.clear();
state &= ~(STATE_OBD_READY | STATE_GUI_ON);
//digitalWrite(SD_CS_PIN, LOW);
for (;;) {
if (!obd.init())
continue;
int value;
if (obd.read(PID_RPM, value) && value > 0)
break;
Narcoleptic.delay(1000);
}
// re-initialize
state |= STATE_OBD_READY;
startTime = millis();
lastSpeedTime = startTime;
lastSpeed = 0;
distance = 0;
#if ENABLE_DATA_LOG
logger.openFile();
#endif
initScreen();
}
// screen layout related stuff
void showStates()
{
lcd.setFontSize(FONT_SIZE_MEDIUM);
lcd.setColor(RGB16_WHITE);
lcd.setCursor(0, 8);
lcd.print("MEMS ");
lcd.setColor((state & STATE_MEMS_READY) ? RGB16_GREEN : RGB16_RED);
lcd.draw((state & STATE_MEMS_READY) ? tick : cross, 16, 16);
#if USE_GPS
lcd.setColor(RGB16_WHITE);
lcd.setCursor(60, 8);
lcd.print(" GPS ");
if (state & STATE_GPS_CONNECTED) {
lcd.setColor(RGB16_GREEN);
lcd.draw(tick, 16, 16);
} else {
lcd.setColor(RGB16_RED);
lcd.draw(cross, 16, 16);
}
#endif
lcd.setColor(RGB16_WHITE);
}
void testOut()
{
static const char PROGMEM cmds[][6] = {"ATZ\r", "ATL1\r", "ATRV\r", "0100\r", "010C\r", "0902\r"};
char buf[OBD_RECV_BUF_SIZE];
lcd.setFontSize(FONT_SIZE_SMALL);
lcd.setCursor(0, 11);
for (byte i = 0; i < sizeof(cmds) / sizeof(cmds[0]); i++) {
char cmd[6];
memcpy_P(cmd, cmds[i], sizeof(cmd));
lcd.setColor(RGB16_WHITE);
lcd.print("Sending ");
lcd.println(cmd);
lcd.setColor(RGB16_CYAN);
if (obd.sendCommand(cmd, buf)) {
char *p = strstr(buf, cmd);
if (p)
p += strlen(cmd);
else
p = buf;
while (*p == '\r') p++;
while (*p) {
lcd.write(*p);
if (*p == '\r' && *(p + 1) != '\r')
lcd.write('\n');
p++;
}
} else {
lcd.println("Timeout");
}
delay(500);
}
lcd.println();
}
void setup()
{
lcd.begin();
lcd.setFontSize(FONT_SIZE_MEDIUM);
lcd.setColor(0xFFE0);
lcd.println("MEGA LOGGER - OBD-II/GPS/MEMS");
lcd.println();
lcd.setColor(RGB16_WHITE);
#if USE_GPS
GPSUART.begin(GPS_BAUDRATE);
// switching to 10Hz mode, effective only for MTK3329
//GPSUART.println(PMTK_SET_NMEA_OUTPUT_ALLDATA);
//GPSUART.println(PMTK_SET_NMEA_UPDATE_10HZ);
lastGPSDataTime = 0;
#endif
logger.initSender();
#if ENABLE_DATA_LOG
if (checkSD()) {
uint16_t index = logger.openFile();
lcd.println();
if (index > 0) {
lcd.print("File ID:");
lcd.println(index);
} else {
lcd.print("No File");
}
}
#endif
#if USE_MPU6050 || USE_MPU9150
Wire.begin();
accelgyro.initialize();
if (accelgyro.testConnection()) state |= STATE_MEMS_READY;
#endif
showStates();
#if USE_GPS
unsigned long t = millis();
do {
if (GPSUART.available() && GPSUART.read() == '\r') {
state |= STATE_GPS_CONNECTED;
break;
}
} while (millis() - t <= 2000);
showStates();
#endif
obd.begin();
// this will send a bunch of commands and display response
testOut();
// initialize the OBD until success
while (!obd.init(OBD_PROTOCOL));
state |= STATE_OBD_READY;
lcd.setColor(RGB16_GREEN);
lcd.setFontSize(FONT_SIZE_MEDIUM);
lcd.println("READY!");
char buf[OBD_RECV_BUF_SIZE];
if (obd.getVIN(buf)) {
lcd.setFontSize(FONT_SIZE_SMALL);
lcd.setColor(RGB16_WHITE);
lcd.print("VIN:");
lcd.setColor(RGB16_YELLOW);
lcd.print(buf);
}
//lcd.setFont(FONT_SIZE_MEDIUM);
//lcd.setCursor(0, 14);
//lcd.print("VIN: XXXXXXXX");
showECUCap();
delay(3000);
fadeOutScreen();
initScreen();
startTime = millis();
lastSpeedTime = startTime;
lastRefreshTime = millis();
}
void loop()
{
static byte index = 0;
static byte index2 = 0;
static byte index3 = 0;
byte pid = pgm_read_byte(pidTier1 + index++);
logOBDData(pid);
if (index == TIER_NUM1) {
index = 0;
if (index2 == TIER_NUM2) {
index2 = 0;
pid = pgm_read_byte(pidTier3 + index3);
if (obd.isValidPID(pid)) {
logOBDData(pid);
}
index3 = (index3 + 1) % TIER_NUM3;
if (index3 == 0) {
float v = obd.getVoltage();
ShowVoltage(v);
logger.logData(PID_BATTERY_VOLTAGE, (int)(v * 100));
}
} else {
pid = pgm_read_byte(pidTier2 + index2);
if (obd.isValidPID(pid)) {
logOBDData(pid);
}
index2++;
}
}
if (logger.dataTime - lastRefreshTime >= 1000) {
char buf[12];
// display elapsed time
unsigned int sec = (logger.dataTime - startTime) / 1000;
sprintf(buf, "%02u:%02u", sec / 60, sec % 60);
lcd.setFontSize(FONT_SIZE_MEDIUM);
lcd.setCursor(250, 2);
lcd.print(buf);
// display OBD time
if (obdTime) {
lcd.setFontSize(FONT_SIZE_SMALL);
lcd.setCursor(242, 26);
lcd.print((uint16_t)(obdTime / obdCount));
lcd.print("ms ");
}
lastRefreshTime = logger.dataTime;
}
if (obd.errors >= 3) {
reconnect();
}
#if USE_GPS
if (millis() - lastGPSDataTime > GPS_DATA_TIMEOUT || gps.satellites() < 3) {
// GPS not ready
state &= ~STATE_GPS_READY;
} else {
// GPS ready
state |= STATE_GPS_READY;
}
#endif
}
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖!
更多
相关文档
文档一:TELEMATICS LCD SHIELD库文件
![]() [Link ]
[Link ]