小白无障碍制作——基于Romeo BLE mini 控制器的BOB
今天给大家介绍的是基于Romeo BLE mini 控制器的BOB,当然这东西大家一定不陌生,作为一个桌面级的入门玩具机器人,还是蛮可爱的。
【视频展示】
【图片展示】

整体效果.jpg (31.16 KB, 下载次数: 2)
下载附件
保存到相册
2016-3-3 21:37 上传
【制作器材】
工具:
1.Overlord Pro(3D打印神器)
2.螺丝刀
材料:
1.Romeo BLE mini 控制器(绝对是一款经典之作,尤其是身材)
2.TowerPro SG90舵机(如果是给熊孩子玩,可以考虑金属的)
3.超声波传感器
4.卷式结束保护带(6mm)
5.圆柱形充电器(淘宝)
6.PLA蓝色
【制作步骤】
一、打印结构件

打印件.jpg (35.58 KB, 下载次数: 2)
下载附件
保存到相册
2016-3-3 22:25 上传
都是基本结构类型,没有什么特别注意的地方。主要考虑到的是结构的稳定性,所以我在Cura中,设置头部、躯干的填充率为20%,其它部分100%。从而避免头重脚轻的结构出现。
二、安装
1.安装库
本例中使用了一个VarSpeedServo库,使用它让你的程序代码简单不少。Arduino 库文件的更新方法:解压库文件压缩包,将其复制到X:\Program Files\Arduino\libraries目录下即可。
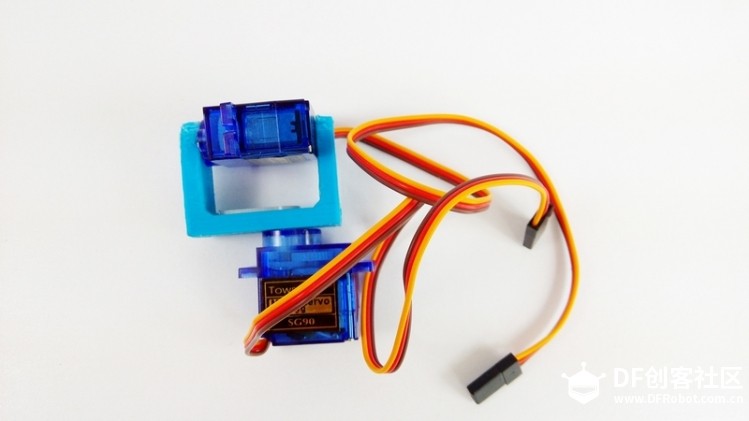
2.安装膝关节舵机
在开始安装舵机前适当清理膝盖部位,舵机务必保证在中位,这里我们可以下载icbob_servo_center.zip。解压到你的Arduino目录。然后运行这个Arduino程序调整每个舵机,保证其初始位置的正确性。这步做完后,我们可以将 舵机安装到膝关节和髋关节上,如下图

舵盘.jpg (20.3 KB, 下载次数: 2)
下载附件
保存到相册
2016-3-3 22:46 上传
舵盘安装在膝关节上

舵机.jpg (34.41 KB, 下载次数: 2)
下载附件
保存到相册
2016-3-3 22:47 上传
舵机安装在膝关节上
2舵机.jpg (36.81 KB, 下载次数: 2)
下载附件
保存到相册
2016-3-3 22:48 上传
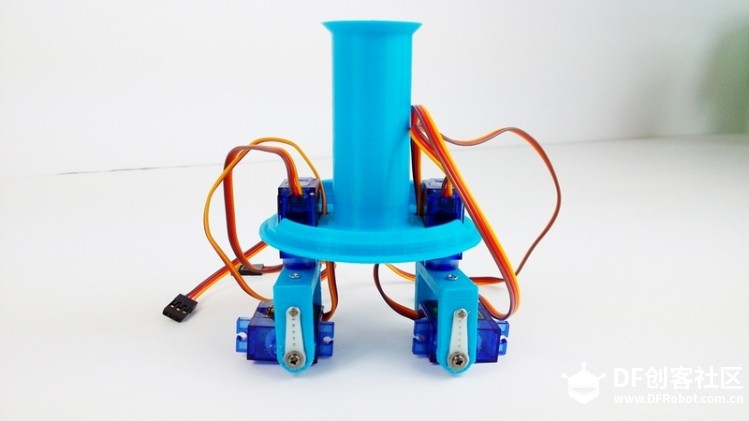
髋关节安装

双腿.jpg (45.41 KB, 下载次数: 2)
下载附件
保存到相册
2016-3-3 22:49 上传
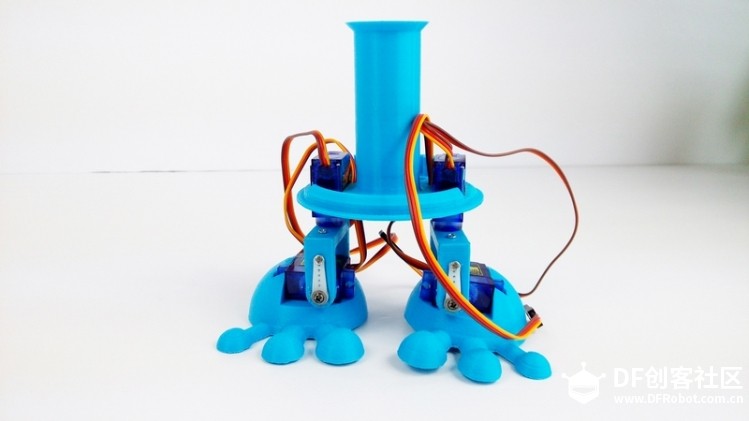
另外一只方法一致
3.将腿安装到身体
结构.jpg (39.22 KB, 下载次数: 2)
下载附件
保存到相册
2016-3-3 22:51 上传
这里需要注意前后的方向。用螺丝将其固定
4.将脚安装到身体
安装脚步.jpg (37.29 KB, 下载次数: 2)
下载附件
保存到相册
2016-3-3 22:55 上传
5.舵机与Romeo连接

QQ图片20160303230927.png (474.89 KB, 下载次数: 2)
下载附件
保存到相册
2016-3-3 23:05 上传
6.复位舵机烧录下列代码复位舵机(icbob_home_calibration)7.行走步态烧录下列代码可让其向前行走(icbob_move_generator)8.添加超声波传感器将超声波传感器安放在头部眼眶中,trigger_pin接控制器数字口12和echo_pin 接主控器数字口3 。VVC和GND接主控板+5V和GND9.避障行走烧录下列代码可实现其避障行走(icbob_walk_avoid_turn)自此制作完毕,希望大家能玩出更多花样。