Arduino内置教程-通讯-串口呼叫响应ASCII
串口呼叫响应ASCII (握手)
这个例子示范了用呼叫响应(握手)方式从Arduino 或Genuino开发板到电脑的串口通讯。
这个程序在启动时发送一个ASCII 字符串,并且等它收到来自电脑的串口回应时重发。然后,它发送三个传感值作为 ASCII解码的数字(逗号分开,换行+回车结束),并且等待电脑的另一个回应。
你可以用Arduino IDE串口监视器来观察发送的数据,或者用Processing, Flash, PD, Max/MSP (看下面例子)等等来读取。下面的例子用逗号分开输入的字符串,并转换成字符串重新输入到数字里。
比较这个和串口呼叫响应例子。他们在共同使用的握手方式上很相似,但这个把读到的传感值作为字符串解码,而另一个作为二进制值发送。而发送像ASCII-encoded的字符串承载更多的字节,这意味着你可以很容易发送比255更大的字节的传感器读取值。它同样容易在串口终端程序里读取。
硬件要求
- Arduino or Genuino 开发板
- 2 模拟传感器 (电位计, 光敏电阻, FSR 等)
- 按键
- 3 10K ohm 电阻
- 连接线
- 面包板
软件要求
- Processing 或者 Max/MSP version 5
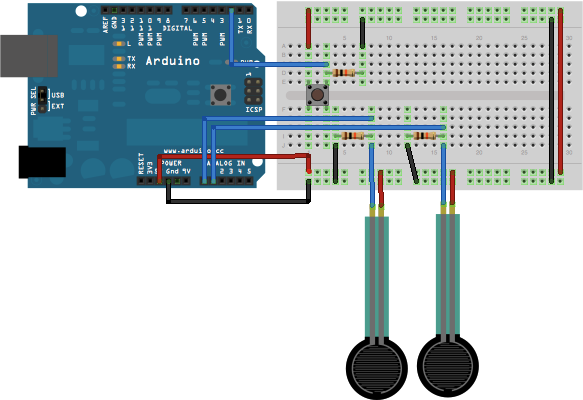
电路
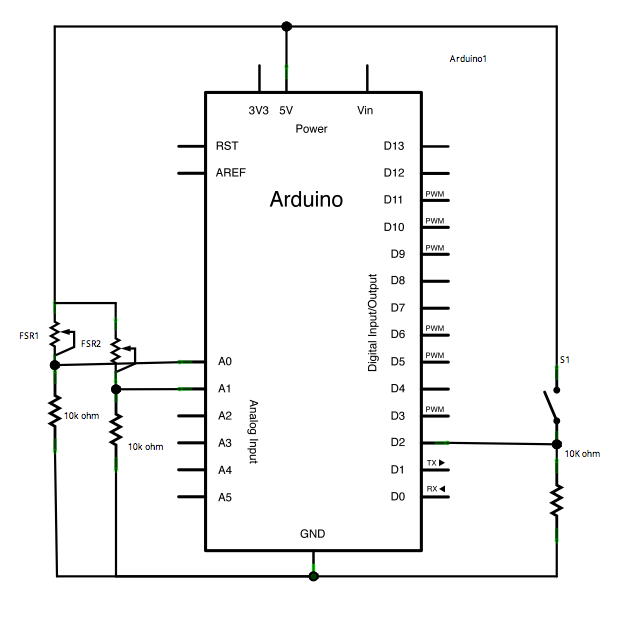
- 把模拟传感器(作为分压器)通过10k ohm电阻连接到模拟引脚PIN0和PIN1。
- 把一个按键或者开关连接到数字I/O口pin2,并通过一个10k ohm电阻下拉到地。
原理图
样例代码
/*
Serial Call and Response in ASCII
Language: Wiring/Arduino
This program sends an ASCII A (byte of value 65) on startup
and repeats that until it gets some data in.
Then it waits for a byte in the serial port, and
sends three ASCII-encoded, comma-separated sensor values,
truncated by a linefeed and carriage return,
whenever it gets a byte in.
Thanks to Greg Shakar and Scott Fitzgerald for the improvements
The circuit:
* potentiometers attached to analog inputs 0 and 1
* pushbutton attached to digital I/O 2
Created 26 Sept. 2005
by Tom Igoe
modified 24 Apr 2012
by Tom Igoe and Scott Fitzgerald
This example code is in the public domain.
http://www.arduino.cc/en/Tutorial/SerialCallResponseASCII
*/
int firstSensor = 0; // first analog sensor
int secondSensor = 0; // second analog sensor
int thirdSensor = 0; // digital sensor
int inByte = 0; // incoming serial byte
void setup() {
// start serial port at 9600 bps and wait for port to open:
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
pinMode(2, INPUT); // digital sensor is on digital pin 2
establishContact(); // send a byte to establish contact until receiver responds
}
void loop() {
// if we get a valid byte, read analog ins:
if (Serial.available() > 0) {
// get incoming byte:
inByte = Serial.read();
// read first analog input:
firstSensor = analogRead(A0);
// read second analog input:
secondSensor = analogRead(A1);
// read switch, map it to 0 or 255L
thirdSensor = map(digitalRead(2), 0, 1, 0, 255);
// send sensor values:
Serial.print(firstSensor);
Serial.print(",");
Serial.print(secondSensor);
Serial.print(",");
Serial.println(thirdSensor);
}
}
void establishContact() {
while (Serial.available() <= 0) {
Serial.println("0,0,0"); // send an initial string
delay(300);
}
}
/*
Processing code to run with this example:
// This example code is in the public domain.
import processing.serial.*; // import the Processing serial library
Serial myPort; // The serial port
float bgcolor; // Background color
float fgcolor; // Fill color
float xpos, ypos; // Starting position of the ball
void setup() {
size(640,480);
// List all the available serial ports
// if using Processing 2.1 or later, use Serial.printArray()
println(Serial.list());
// I know that the first port in the serial list on my mac
// is always my Arduino module, so I open Serial.list()[0].
// Change the 0 to the appropriate number of the serial port
// that your microcontroller is attached to.
myPort = new Serial(this, Serial.list()[0], 9600);
// read bytes into a buffer until you get a linefeed (ASCII 10):
myPort.bufferUntil('\n');
// draw with smooth edges:
smooth();
}
void draw() {
background(bgcolor);
fill(fgcolor);
// Draw the shape
ellipse(xpos, ypos, 20, 20);
}
// serialEvent method is run automatically by the Processing applet
// whenever the buffer reaches the byte value set in the bufferUntil()
// method in the setup():
void serialEvent(Serial myPort) {
// read the serial buffer:
String myString = myPort.readStringUntil('\n');
// if you got any bytes other than the linefeed:
myString = trim(myString);
// split the string at the commas
// and convert the sections into integers:
int sensors[] = int(split(myString, ','));
// print out the values you got:
for (int sensorNum = 0; sensorNum < sensors.length; sensorNum++) {
print("Sensor " + sensorNum + ": " + sensors[sensorNum] + "\t");
}
// add a linefeed after all the sensor values are printed:
println();
if (sensors.length > 1) {
xpos = map(sensors[0], 0,1023,0,width);
ypos = map(sensors[1], 0,1023,0,height);
fgcolor = sensors[2];
}
// send a byte to ask for more data:
myPort.write("A");
}
*/
/*
Max/MSP version 5 patch to run with this example:
----------begin_max5_patcher----------
3640.3oc6cs0jZajE94Y9UzKkeHoVloTeSHkm1II0VkeHIthSs6C1obIjZ.E
KjHRhY7jT4+9d5KBj.jTCAXfoV6x.sj5VmyWet127ed6MCFm8EQw.z2f9.5l
a9yau4F0kjW3FS4aFLO3KgIAEpGaPX174hzxAC02qT7kR80mkkUHPAnBQdbP
BZQVdIZRd1bT4r3BDTmkU0YQPY3r3zoeJWDVpe2ttr6cFhvXt7KhyH8W26f9
USkhiTulrw+1czQUszjrzxzf4B0sdP9dqtS5x4woIhREQiWewrkkUW0oViTD
+GpFASt2Qd0+51akeLzRPIU7DPXagIFnH.4653f9WAKKyxVHRQNcfDXlih2w
puvbdWHAlcTPBRKHg4x5mr74EBMINHV1+iFL.8qG.VMWTTDLUrs.TBH+zAvP
nTEhvvxun9pBd6FWH38DWH6DWv6ItbX.RKBOJ7XbP5ztvDesvhBLb6VTwcOg
DmiBjnXfiIrjjED0CpP490PEmtPExwQA5EGUVjK.CKQJqtcYl0nCMRAJi76D
Z7dQflCCVV1i+ENiTy3AwYaghEA4.KVJx+jHMXbhntJPceO3iBpPOPKtZqtU
jUoXtw28fkEimmEIlOI.3Q4iMT9wO+iLxc9O7sN28928t6Ve8uMYo.7EUN6t
ePVoUW+6E4hOW7CAgeaV1meWd1cuWnYLy8mKhhClGDd25F3ce+C2si1Ud42+
bZ3IQJOXg7q96t80e50YvDjqHw7VvkRTXhHHuKEerRwmqfBFsS.g9h.HZN3X
hJf5Qd+xHZHgzc.mrqeYjbn4E84evfIDUjDtjNwD2iRHV6anmGdbmsfKxTTJ
dd93rjtBJ2U42foCwZDqKfYzKkrh4VgYIY4FxVRmN2646f8ck+xw7KrjzOlZ
ZYAVfdZgKlaWn29FzA8nfdR2quj.3ejflBJnKr.Dwpf13cZBm85P0rPj.rOB
6fvztPFGkVI0SAPi5NKHmih7E8Ph2e35uOtYN6x6JEQtJVWpV7gRtm2dZy9W
+YMCxLHrEvAknQktDVdY7v82SFosgmSGHO56BRRt6mEEKxRKDnGd+2812h9X
5GSeODOcAJ.M9YHHAfjPkyD0GIugn.Ht6bQ.7TTS8DoPtCQCQxWobX+jYPUJ
hPn3zgnx7kogphieFZ2j3TwDgH5dzaUscJ77kEnIY4hoYKglVYzcH5KKxJzu
qmgegxl.0MLNGBNDsr.5IUz0iAPZFE.0TtLOEdClQYrAAeORwW+XVo3aP+hb
DHUBCH.mfbEKfGOPyjQhGiCAdNUUBRcQjij4X.u5MZRDzHSyTDQFbcYdHHIM
AzlF1lnoLjKG8UZH5guV1vEkA4kKWbOPGPC9YgjNdJHVy+ZJQ1.Cq.FUWQpA
ke.8DbUwi.YEWBUCDhPyAXCEETFbuhICg9EIRiYnGVjKyt0+io.r+9vrxRz+
Nt7OlJxCRhT35u.X0amlI9X5xEQppQwneJrLarPVU7JkGYWVHz2njevz1UoX
XkoEWOkxDWO9kXYocoTwuzF611zXJyimB3F5qf9nOT9qesryJTJ1EOcV4cIh
IPVWYoOBUMFTl.4sGRRzRT4AOIkRjn8h7LnNJI2mhg6OSk5JZrPJ4i9gfu.R
w+NHLCcpfAMij88n+qTPPMt4UTwj3bAnY.h.aIe.RiAEeF8Pdzx3zLkLUs1Z
mcmczah0FH4ZmpLcp.rVbX3d0zalKhSiKAxBZ9BU2zTP3uPobgL1Q.U0.kl+
jcBZj1AMOpzsJYjdz0n53QXsfYrqELKblH7yUFoDfPVXbrwDGXqCjwjviT7a
rXZbpxOvxzXvpOnPH0GlTJMZog8l2UZJcdPjxjG7ywIYgeFULaInFDk8jpxZ
apvMA4cv9X.7.vaRRGFAcPYHMR0dF2BZC7wEJ2TOKeZnCRD+HzJo.OLWSW6r
qk2wfI6pGf.pdjC4rpfL2YeK8JYloVf93.ocJEvocv9wAcEiMQgBtl.lb0y9
heKnvtGRs+iHOJHM3uaZbN1jDrhED4FfwfLPCEmH8jV.BB0Z+aF.Vkqc4apU
EIb9a5zAcGt5Rf3WdsNJ3R4PXDU0mouHzIca0MWO.KpQjT8oq1SIyqV3mP24
ToxfHpdyOPNqgwoK.W.fxfRNtwsiDSBVlT9ociSMu+jfPQqUtk9paFLMONJK
URFMpq7xUuvOXF1HBuN6ndhzfE6nxPXQkKKFGjKQNyHtSptYYVVRyaspyBD3
CRiA0YQYrlbgHdptY77E4wZk5UWSOf9yJByyRRZzT5673NtiNrvmhiJmoZq5
fI73wKp5DFrBihhmBNxadsxfoEMuRiIbutfVcM4FWuyr.2bvrlNF5.3U+q9C
sKaa5jkMt70iSd8bC2ZbEFUuAa0DWqYF0tJ91p43649br2nZ2usLGuoxrnQq
6TArNx+1CjRLPpVWf62Kj59ZFRa38Y6D0kRo8AnT8b0g0e4p8+f6.P4sBnaX
TqMmPsOdOcjG+dMtOmdzcgLdIGqjX0J+FAVrmSu.L8fAX19Ky1C.e1.z+IB2
qpeCIUV+.I4fARxQGH0i.9ECVZrhZMTheMCkc4XRMsoCgbef2ZFjaF5MXzaH
n2PQugYmhe0WjdcU47Z1Ukhb6CwFISy2HNtcvtaNRWdshHNVgHcNMUlopRm4
tJByyLXfI0UN6GM7eUiFTm8BMbctZQC8atOegDu6oveXrgpeaGnfaETvsBJN
6AKuNsT4n+zRVXJtQd+ciEEYKyCq.8ptRTSdBRQrLNcUd5eXcjoa7fyhihZl
UrNQxBYZo5g.vpdt8klkJi1QyPvdH7UFMStbvYu8Amu1nY7ECMKGXBqnY2KH
Z18Jjl4aYNnEYiQWVzrUxytWNzL0VZ14xglI6isN5kAMi2GZlbYPyNma6FqC
aJRs9qEogO+ovfvYFxxjGV07cLnH3QQzm.R.BG7SAkk4wiWVpC2p9jwX23ka
0zSz4M6e1QZY.8mljMNHwLURqZ9FuzslMk8ZJXtcMPeblVut1XYDhdMCpmjZ
8BAqsU9DezKxJAa8Hmbbfi+wccuVv7c0qELrEHB+UAhHWzCfCbKPEyBki24Z
clythVwfkYSmlHrPdX8tC5v1iPb5ArPuOWc8NVrRZspq24UxhE0wBcAsMyt2
2LLuqvkKZRXjEq5CM6S3tq9Zm6HD+8Prm0F+jDWn1paUe+2ZuF259kxkiR5W
Qf6vzKBtMm+gFrMeuWsKW.6B61VyWOFjz0Zsmwza+.ikxQcAL3iDtbLWMTKm
OtyMEFcjWM9iu0rMa81D8kUl3v2ewcHWP5B2HX6kK7t7DL5fs6JVIrO0Z1l3
bEpOP3zih9.gbspPzKDYbRVAQ7CFhtZsYzhW1ko0WEJcG3oAC0aRIyxKsUEI
+iDPwOLfp0uNA68MmtSUSmRuNb8d1ttWya7sVWf5Iwf.1LQtZUnqNvT1bS6z
E5o2vfqNSH5bufQbuZV09M.E04Mj8XBUiBqNGl5FSt3NGlZaGRpV6wc4kiWi
q0twaaORhul1jjsIi7cMjQlJJUaQuhR495nlfRQWRJXkrgmMGXWjKM4jdGJH
yovkl4HUetutzWuY5tjFHneGn77rtG3iJ92whCVJxKhBwgGtRaFIzabfNrRn
WThd9q24vsZjf9JvHwOKBhprFDmtXYIZ7xISjaO1GE4OK2V9yiS.qFhvrznh
8cKyMZs7EVepT01FlCe0rIC0lUk6NX4N9syCyAE660+ovE9hyGqjaGurrLak
G0YwoMlFO4YMSZjd9DcWucsjUr1Yqgy8TluCY3N9Q8.+k0JCD3ZTS0CW8Qyb
s19nOxrgjw7VFU+3ooYviK66pCfimt8AAxHOOBkK+EajC2yayWtciMzgdvpM
NKORj29YyGcS4wFVlql0wcZTg1yw5wvMNiTpuUzpu.Y0miRlgO0w7wpZI2Em
SUBGayVM5eqU4C+rV4ZSPkvXqLJbAHlR3mKwT5ISL8+Kv0k.GWEKwpP3ewk3
7omKIN7EtDmp4ZtHk0BfatXgLhgasHgZrVYaY8AIO7fq8Pas1fFzjd4ibwpd
XO4GXOeOG+lcyasNh1R+wVx2yBxeTOT+wiZFYA0P48PNyiiVjAhJlNT4Qvpb
uj3aN2qYqJcBfSWhMbf+YCPcsfbNeTC2l9WNc+5eIlkST0RJgupzIn+kysgC
X6GGXnYpdYfP0GP6MKQXM3N1Ih6XVvcLuym7B0B5w8v.ahqBI49qJcJ.TaX.
N+xBP4NGHhhqYfkRNM9q1f3ZweqyYCQYdGCSZGQ5wBx47o.Ssw+CkcgQOmud
KZic4QKzCw+7ROm8nY2LfMsEDtdfeMKSn5Ev95IQhorcqJcBrzPsQUhRNe8M
1X6lhOezC4Bidv1nKcFs8YimJ9n8RWZXiO7aSCxDRLdjd91qU5TnmXCeRvmR
9jnm7b15RmJ9rO4Kr+IgO04BfczyOpqx9npzofOsIlaR8Mo0IUMR48i0mYly
lVMwlw6gbloGRezy4yKEw6BHBBWik.eRi3DNM5KDahS.SOE1EjmXl7Uyqo9T
AtQAO8fG3oLX3cZFxKh0FLNSRfDaoG74gdvW.ZDU9FMGSdFMBt+IQh.6eIvw
FujTkJREGKKcJ3X2WtXf7Ub1HywEqxh2tJnE.FcZhMByrcXQw1x+bOWJYjpy
lv8oq55aEHLcwD8hJjxbVU5EigcNtL7Ql76KVVp69Huhcb87vpoCkRYT+96v
Hd5Ay1rofMqm+FkLYvv0+GL3FkL6bLp21kL6QFNV8BNM48foWBV4zt1wXm5V
4jkNEbL45dtNw13Iltmi9sAyY0S0l8BR+3yWjVXax7eOmKrp4m0QKIal6VYo
SAf5XQxSrCa5l0qk45k5kAzqEgMNgzkz9FmL5abpnu4IhNzZ+0s+OKCSg0.
-----------end_max5_patcher-----------
*/
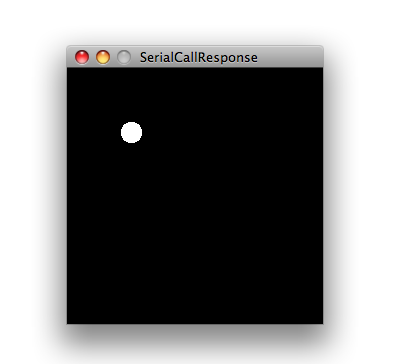
Processing 代码
从上面代码里复制Processing程序。随着你改变模拟传感器的值,你会获得一个在显示屏上运动的球,像这样。这个球只在你按下按钮时出现:
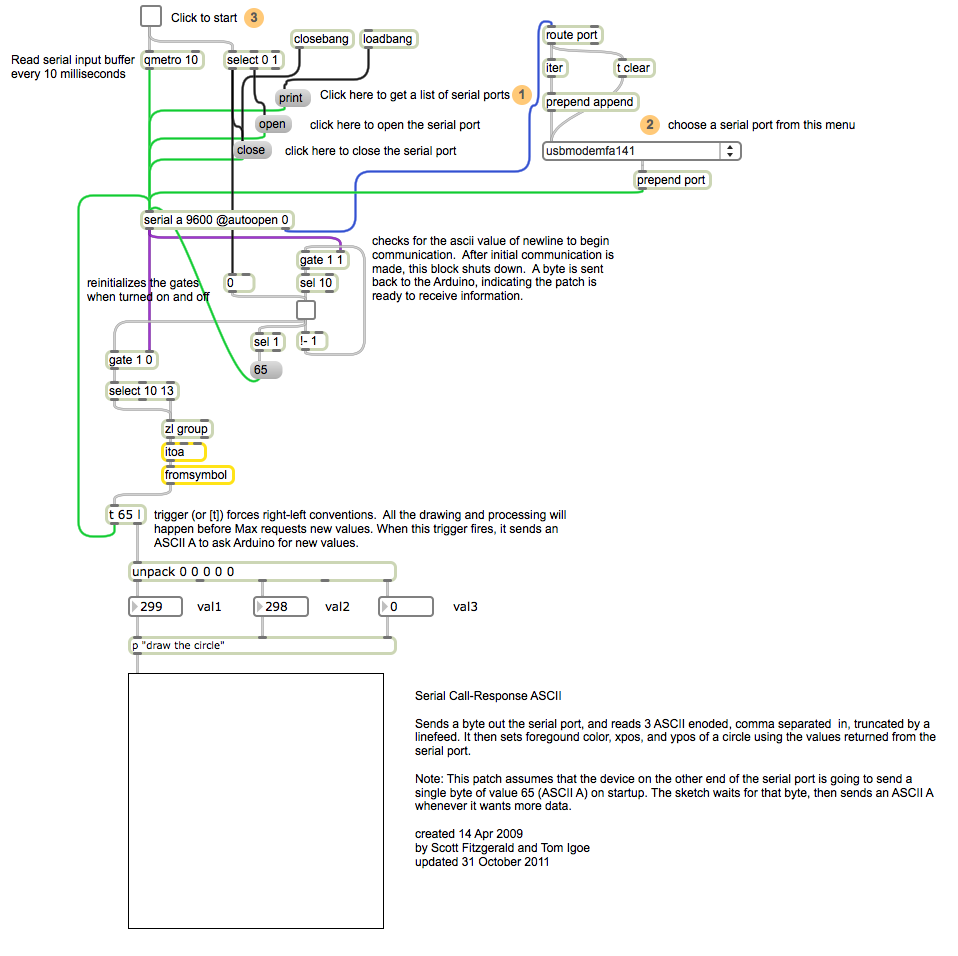
Max 代码
max patch看起来像这样。 从上面代码里复制Max代码,粘贴到一个新的Max窗口。
更多
- serial.begin()
- serial.available()
- serial.print()
- analogRead()
- map()
- ASCIITable - 示范使用Arduino的高等的串口输出函数。
- Dimmer - 移动鼠标来改变LED灯的亮度
- Graph - 发送数据到电脑,然后在Processing里画出它的图表。
- Midi - 连续发送MIDI音符信息
- MultiSerialMega - 使能Arduino Mega上2个串口。
- PhysicalPixel - 通过从Processing或者Max/MSP发送数据到Arduino上,使LED开关。
- ReadASCIIString - 分析整数里一个用逗号分隔的字符串,来使一个LED灯褪色。
- SerialCallResponse - 通过一个呼-应的方法(握手)来发送多个变数
- SerialCallResponseASCII - 通过一个呼-应的方法(握手)来发送多个变数,并在发送前解码(ASCII)这些数值。
- SerialEvent - 使用SerialEvent()函数
- VirtualColorMixer - 从Arduino发送多个变数到你的电脑,然后在Processing或者Max/MSP上读取这些数据