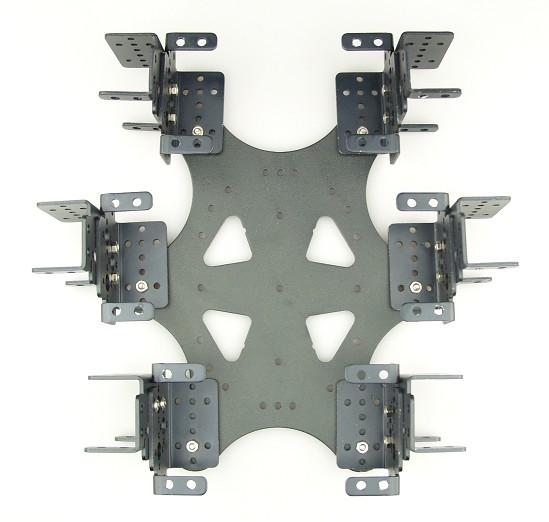
HEX六足蜘蛛机器人铝合金支架
<img alt="Spider 6X 1.jpg" src="http://images.ncnynl.com/arduino/2016/550px-Spider_6X_1.jpg" width="550" height="345" />


•先使用舵机控制器或单片机将6个舵机的角度都调整到中间。使码盘四个间距最短的圆孔成正90度十字。
注意:先调整6个舵机。请不要将18个舵机都调成90度。

•将剩下12个舵机的角度都调整到90度。使码盘四个间距最短的圆孔成正45度角×字。

•将2个多功能舵机支架按下图排列安装,各组装3套。

•使用M36螺丝和螺母将2个多功能舵机支架固定住。

•将杯士轴承、M310螺丝、弹垫按下图排列组装。

•将杯士轴承、M310螺丝、弹垫从底板的下面向上穿过。

•将组装好的多功能支架使用螺母固定在轴承上。

•左右各3套,请注意左右多功能舵机支架的方向。
•将6个调整为90度十字的舵机安装到多功能支架上,使用M38或者M48螺丝固定舵机。

•将M310的铜柱装另一个底板上,32路舵机控制器安装到上面。
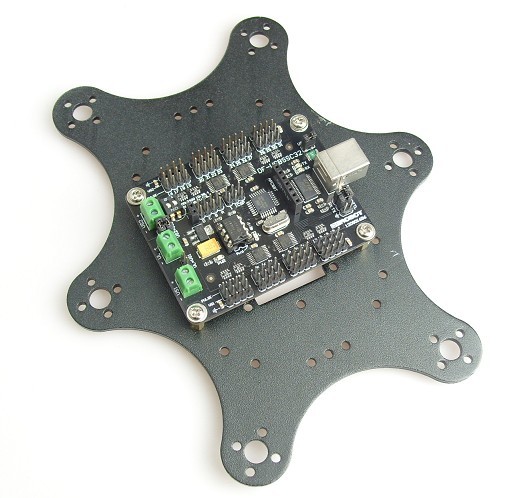
•使用自攻螺丝将底板安到底层舵机上。
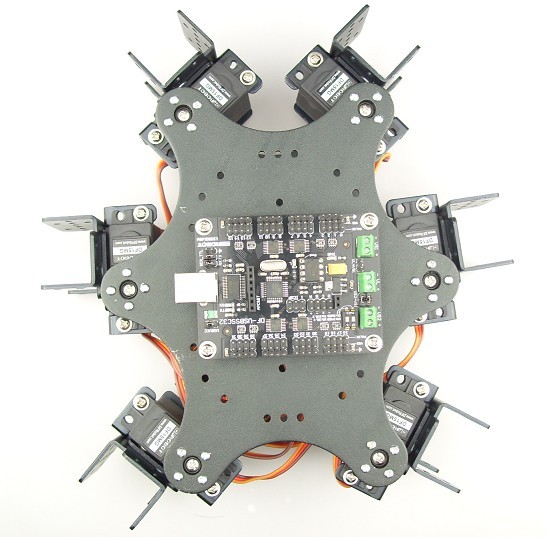
•接着装6个调整为45度×字的舵机。

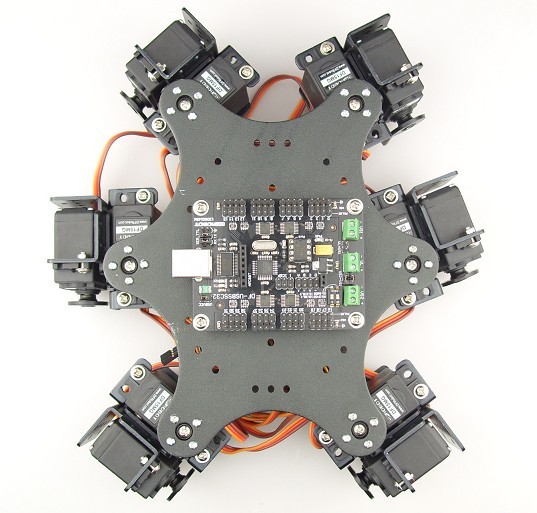
•使用自攻螺丝将6个蜘蛛机器人小腿装到舵机上,注意小腿的角度,和舵机成45度安装。

•将剩下的6个舵机安装到蜘蛛机器人的大腿上,左右各3套。

•使用自攻螺丝将6个安装好在大腿上的舵机装到小腿上,注意大腿的角度。

![]() 购买 HEX六足蜘蛛机器人铝合金支架 (SKU:ROB0074)
购买 HEX六足蜘蛛机器人铝合金支架 (SKU:ROB0074)