基于Arduino的miniQ 4WD Cherokey机器人平台
<img alt="" src="http://images.ncnynl.com/arduino/2016/400px-ROB0050.jpg" width="400" height="294" class="thumbimage" /> <img src="http://images.ncnynl.com/arduino/2016/magnify-clip.png" width="15" height="11" alt="" />基于Arduino的miniQ 4WD教育机器人平台(SKU:ROB0050)
目录
1 概述
2 技术规格
3 布局说明
4 控制器引脚说明
概述
miniQ 4WD Cherokey主控采用ATmega32u4,mirco USB直接编程。采用4个电机作为主动轮,在四节镍氢充电电池供电的情况下,MiniQ速度可达79cm/s。采用横向花纹的橡胶轮胎,具有良好的抓地能力和稳定性。它与miniQ 4WD的区别是将底盘离地间隙由9mm调整为25mm,取消了底盘下的5个巡线传感器,提高了Cherokey在复杂地形的通过能力。
4WD miniQ Cherokey集成了以下主要部件:
2个 红外发射管
1个 红外接收管
2个 光敏二极管
5个 硅胶按键
1个 全彩LED灯
1个 Micro USB接口
1个 蜂鸣器(无源)
1个 控制器
4个 N20直流电机
1个 电源接口
新版4WD更为初学者提供8节课程,从入门到实现巡线、避障、遥控等,使用户通过教程轻松掌握。代码和教程文件下载
课程1:小车入门
课程2:控制蜂鸣器
课程3:蜂鸣器播报光线方向
课程4:小车巡线程序 (Cherokey不支持)
课程5:RGB 灯的使用
课程6:小车避障程序
课程7:编码器的使用
课程8:红外遥控小车
技术规格
控制器:ATmega32U4
供电方式:通过4节5号AA电池供电或micro-USB供电
工作电压:4.5--6V
驱动方式:四轮驱动(优质mini型金属齿轮减速电机)
最高速度:79cm/s
尺寸:115x110x55mm
重量:400g
布局说明
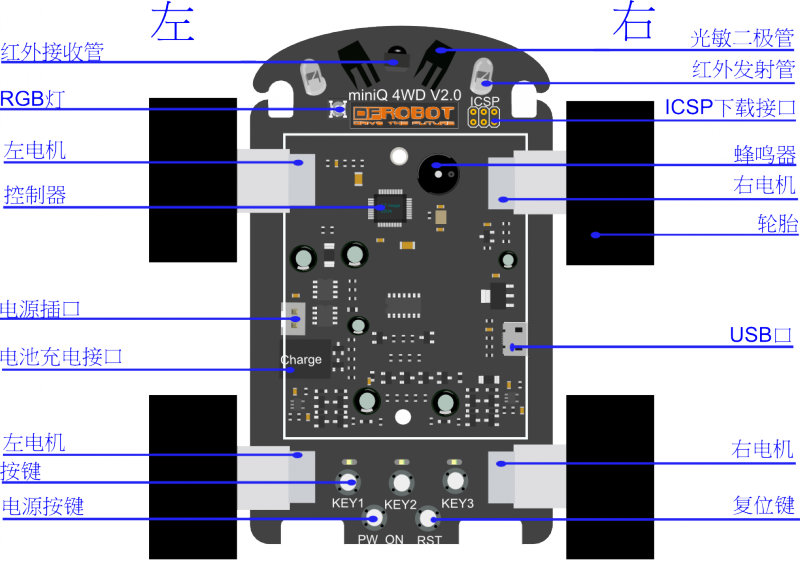
各部分功能介绍:
红外发射管:发射红外信号,用于障碍物探测等
红外接收管:接收红外发射管发射出的红外信号
光敏二极管:用于检测是否有光照,使小车进行寻光运动等
按键:用于输入信号给小车,以控制小车
RGB灯:可以使用程序使其发出不同颜色的光,用于装饰或者程序调试等
USB接口:用于程序下载、调试以及供电
蜂鸣器(无源):发出报警声或音乐等
控制器:AVR芯片Atmega32U4
电机:通过控制电机的不同动作,使小车前进后退或转弯
重启按键:使小车的程序重新运行
电源按键:开关小车电源
电源插口:给整个小车供电
电池充电接口:如果使用的是充电电池,可以直接用这个接口通过充电器给电池充电。
控制器引脚说明
寻光电路部分:A5
电机部分:
D5 —左侧电机速度控制
D12--左侧电机方向控制
D6 —右侧电机速度控制
D7 --右侧电机方向控制
RGB灯
D10--WS2812 RGB灯
红外壁障:
发射部分:D13--IRL 左侧发射管 D8—IRR 右侧发射管
接收部分:D17—IRS 接收管
独立按钮模块:A6
编码器:
D0--INT2 右边轮子
D1--INT3 左边轮子
蜂鸣器:D16(共用MOSI脚)
![]() 购买 基于Arduino的miniQ 4WD Cherokey机器人平台(SKU:ROB0111)
购买 基于Arduino的miniQ 4WD Cherokey机器人平台(SKU:ROB0111)