3PA机器人套装A
<img alt="" src="http://images.ncnynl.com/arduino/2016/300px-3PA_TJ.jpg" width="300" height="252" class="thumbimage" /> <img src="http://images.ncnynl.com/arduino/2016/magnify-clip.png" width="15" height="11" alt="" />3PA机器人套装A(SKU:ROB0044)
目录
1 概述
2 3PA小车车体的组装
3 控制电路的安装
4 试一试自己编写下面的几个有趣的机器人行为
概述
3 Powered Arduino平台是一款非常方便扩展的机器人平台,不但可以用51控制、STC控制器、AVR控制器控制外,更适合使用世界上广泛推广的Arduino控制器。2轮差速驱动,使用转弯半径趋近于零,机身采用高强度铝合金材料,高速电机加优质橡胶轮运动灵活快速,适合室内的平坦路面行进。 使用Arduino控制器编程简单,控制起来非常有趣。
小车的机械部分有很多安装孔,可以安装一些传感器等。例如可以安装舵机,在舵机支架上安装一个摄像头,可以将小车行走时周围的环境图像实时传回来,这样就可以作为监控小车啦;可以安装寻线传感器,做寻线比赛;可以安装避障传感器,实现避障功能等。3PA小车可以用于教学的实践,可以用于做小车的比赛,还可以用于相关的研究项目等,只有想不到的没有做不到的哦。利用3PA小车这个平台,我们可以学到轮式机器人的一些知识,还有如何搭建电路和传感器。下面就跟着我一来制作吧!
3PA小车车体的组装

1、将两个直流电机分别安装在3PA小车底盘的两侧。
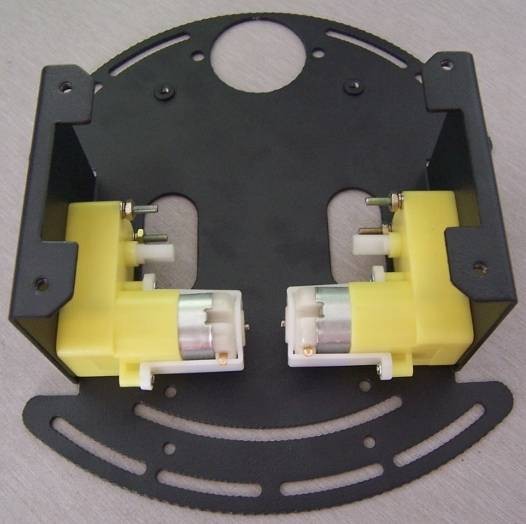
2、将万向轮安装在对应的位置。

3、将两个轮子安装在底盘两侧。

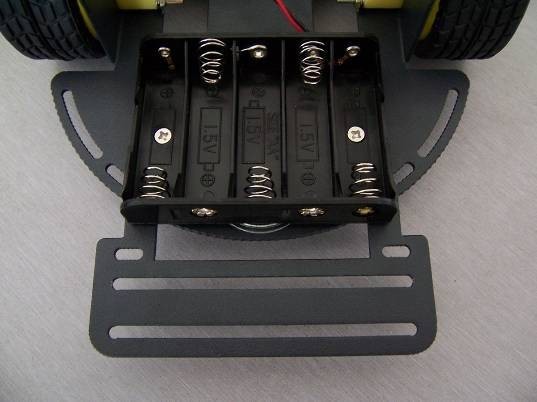
4、安装传感器支架及安装电池盒。
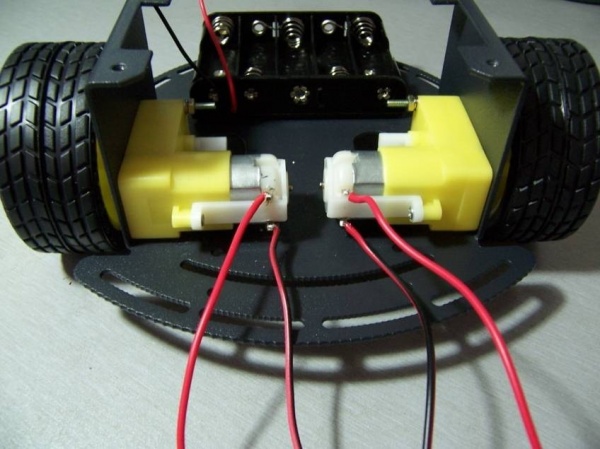
5、接下来要焊接4根线,每个直流电机上的正负极线(上面是正极,下面是负极),导线要留出一定的长度,以便和控制板连接。
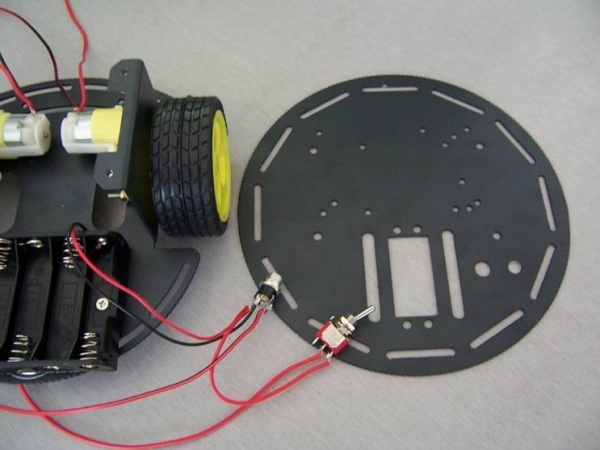
6、焊接开关、充电孔、电池盒之间的连线
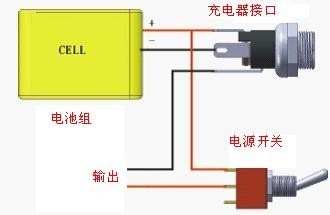
7、将开关和充电孔安装在顶板上。
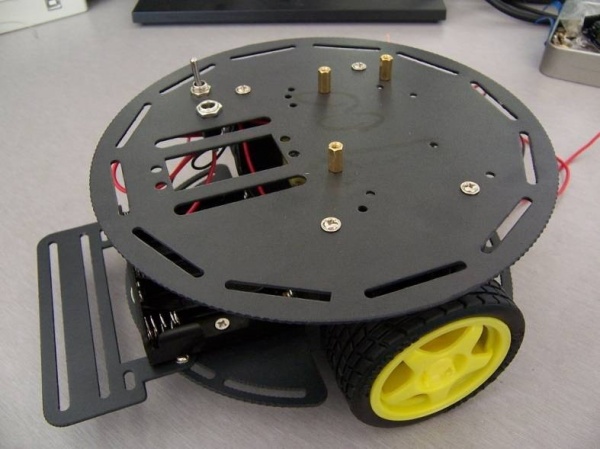
8、在顶板上安装3个铜柱,用于后面安装控制板。
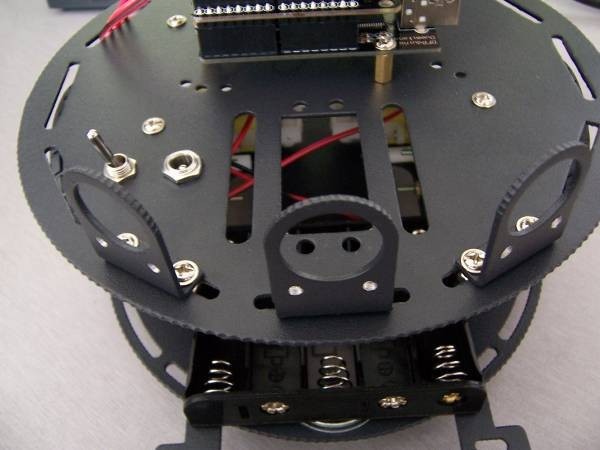
9、安装红外接近开关支架。
控制电路的安装
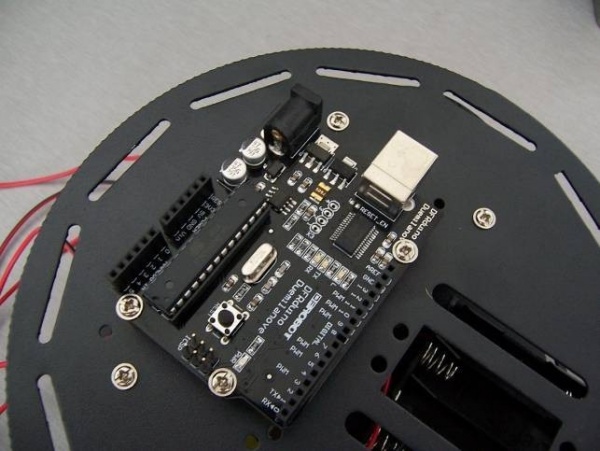
1、安装DFRduino Duemilanove 328控制板。Arduino Duemilanove 328 是一块基与开放原始代码的Simple i/o平台,並且具有使用类似java,C语言的开发环境。让您可以快速使用Arduino语言与Flash或Processing…等软件,作出互动作品。 它的基本技术规格:Digital I/O 数字输入/输出端共 0~13;Analog I/O 模拟输入/输出端共 0~5;支持USB接口协议及供电(不需外接电源);支持ISP下载功能;支持单片机TX/RX端子;支持AREF端子;支持六組PWM端子(Pin11,Pin10,Pin9,Pin6,Pin5,Pin3);输入电压:接上USB时无须外部供电或外部7V~12V DC输入;输出电压:5V DC输出和3.3V DC输出和外部电源输入。
2、将L293 Motor Shield电机驱动板插在控制板上。L293电机控制板是Arduino专用电机驱动1A电流,叠层设计,可与其他模块配合使用,占用数字端口PIN4,PIN5,PIN6,PIN7。驱动部分电源电压:7~12V;驱动部分工作电流Io:≤1A;驱动形式:双路大功率H桥驱动。
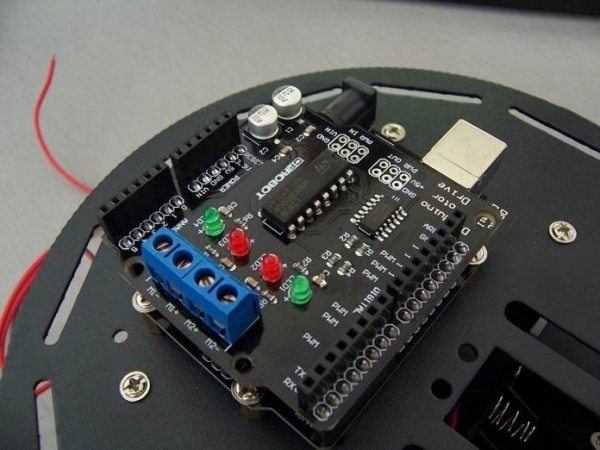
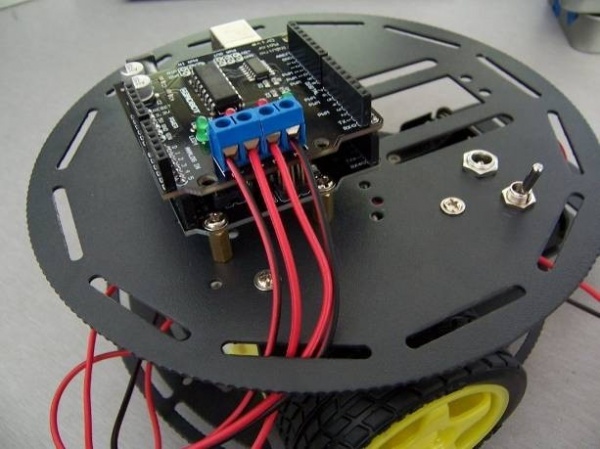
3、将直流电机的4根线插在驱动板上,左轮的正负极插在M1+、M1-,右轮的正负极插在M2+、M2-。
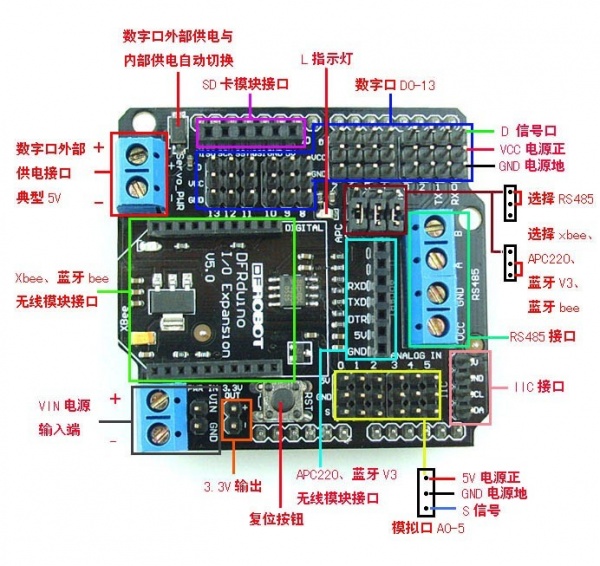
4、安装Xbee传感器扩展板V5。Arduino是一款开源的控制板,非常适合爱好电子制作的朋友制作互动作品,但对于一些不熟悉电子技术的人,要在Arduino上添加电路是一个比较麻烦是事,所以我用了一个传感器扩展板,能使大部分传感器轻松地和Arduino控制板连接。Xbee传感器扩展板V5是具有Xbee无线接口的Arduino传感器扩展板。
技术规格:模块电源:+5V;舵机电源:+5V;模块尺寸:57x54mm。
功能描述:扩展14个数字 IO口(12个舵机接口)及电源;6个模拟IO口及电源;1个数字端口外接电源接线柱;数字端口外部供电和板载电源自动切换;1个外接电源输入接线柱和1个输入插针;RS485接口;复位按钮;xbee/Bluetooh Bee蓝牙无线数传接口;APC220/Bluetooh V3蓝牙无线数传接口;IIC/I2C/TWI接口;3.3V输出端口;SD卡模块接口。
下面是传感器扩展板介绍图:
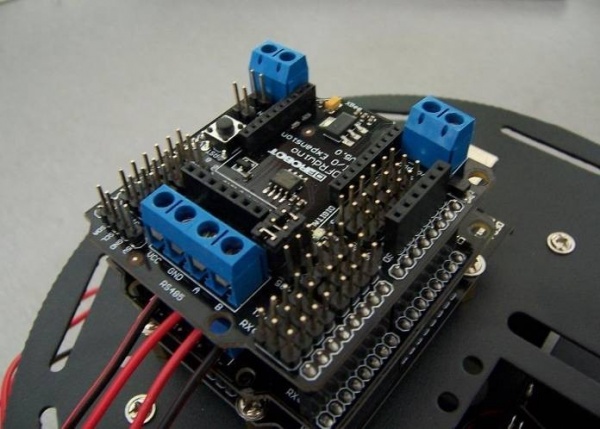
5、将电源正负极线插在扩展板的VIN、GND上。

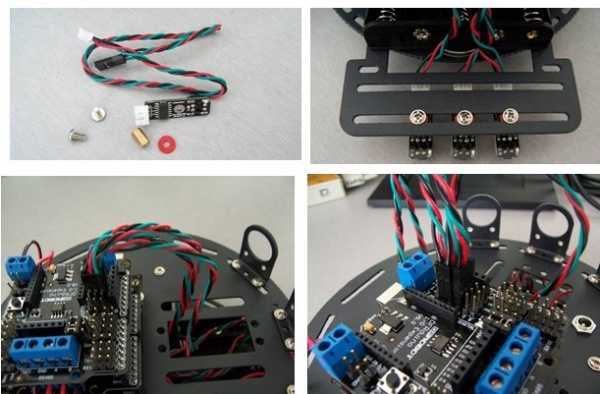
6、安装寻线传感器,并将3个寻线传感器的连接线分别插在扩展板的数字10、11、12接口。Mini寻线传感器可以帮助进行白线或者黑线的跟踪,可以检测白底中的黑线,也可以检测黑底中的白线。单组寻线信号可以提供稳定的TTL输出信号,使寻线更准确更稳定。可任意选择多路组合,安装随方便是寻线机器人的必备传感器。
技术规格:电压:+5V;电流:<10mA;工作温度:0℃~+50℃ ;输出接口:3线制接口(1-信号,2-电源正,3-电源负) ;输出电平:TTL电平(黑线低电平有效,白线高电平有效) ;尺寸:10mm × 35mm ;重量:3g;接口线序:红色线--电源正;黑色线--电源地;绿色线--数字信号。
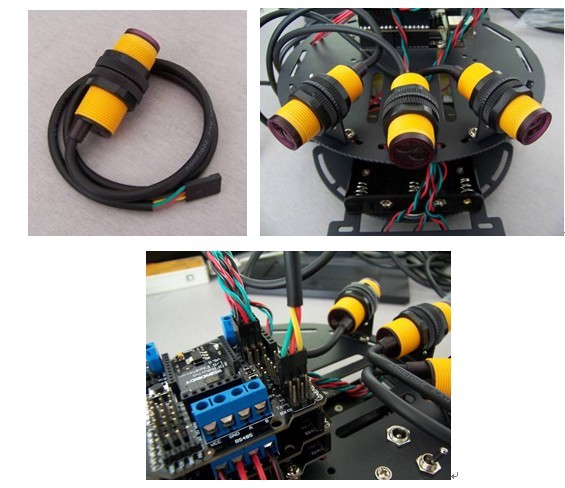
7、安装红外接近开关,并将左边、中间、右边接近开关的连接线分别插在扩展板的数字2、3、8口。红外接近开关是一种集发射与接收于一体的光电开关传感器。检测距离可以根据要求进行调节。该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点,可以广泛应用于机器人避障、互动媒体、工业流水线等众多场合。开关信号输出,无障碍物时输出高电平,有障碍物时输出低电平,并且探头后面指示灯亮,探测范围3cm-80cm。
技术规格:电源:5V;电流:<100mA;探测距离:3~80cm;探头直径:18 mm;
探头长度:45 mm;电缆长度:45 cm;接口定义:红色电源,绿色地,黄色信号输出。
至此,这个3PA小车的组装全部完成,可以进入我们的实战阶段了。让我们好好来把玩一下这个小车吧。
将程序下载到小车后,可以在数字第9口的数据插针上插一根杜邦线,另一端插在GND,就选择了避障模式,小车可以实现避障功能。另一端如果插在VCC就是选择寻线模式,小车可以实现寻线功能。
就像文章最前面所说3PA小车这个平台有很多安装孔,可以安装一些相应的传感器等,实现相应的功能。下面列举三个详细介绍一下:
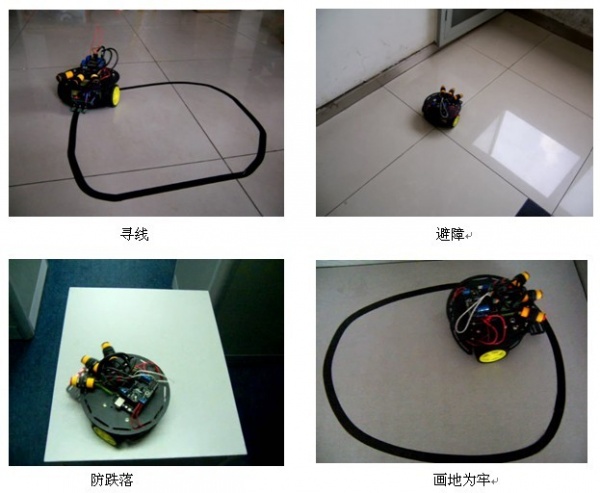
3PA小车配合寻线传感器就可以实现具有寻线功能的小车啦。寻线传感器可以帮助进行白线或者黑线的跟踪,可以检测白底中的黑线,也可以检测黑底中的白线。在程序中写好是检测到白线行驶还是检测到黑线行驶,当检测到不是赛道时要进行转弯等。然后将程序下载到小车。这样将小车放在跑道上后它便会很听话的按照您设定的白线或者黑线的路径进行无人驾驶啦。
3PA小车配合避障传感器就可以实现具有避障功能的小车啦。避障传感器可以检测到是否有障碍物。在程序中我们可以跟据三个传感器在相应的方向上检测障碍物的情况,让小车做出相应的动作,例如:当只有左侧传感器检测到有障碍物时,可以让小车右转。然后将编译好的程序下载到小车。将小车放在地上,当小车没有遇到障碍物时小车可以前行,当遇到障碍物时小车就拐弯躲避障碍物。
3PA小车配合舵机、摄像头、小车控制软件就可以体验远程无线操控的乐趣。我们可以通过舵机支架将摄像头安装在两自由度的舵机上,这样上面的舵机可以控制摄像头左右方向的转动,下面的舵机可以控制摄像头上下的动作。在程序中我们可以编写,当接收到小车控制软件发来的控制摄像头指令(即我们用鼠标控制软件发出的命令),根据是上下动作的指令还是左右转动的指令让舵机转动相应的角度。根据软件接收到的小车周围环境的视频图像,我们可以控制软件让小车前行或转到其他方向。小车接收到软件发来的行驶指令就可以做出相应的动作。小车控制软件介绍连接:[http://www.dfrobot.com.cn/?product-269.html]
您可以把它作为学习工具,学习轮式机器人的知识,为以后做人形机器人做基础;可以学习一些搭建电路和传感器的知识;也可以学习编程知识,利用3PA小车平台和控制板,来学习用程序控制小车的一些知识。您可以把它作为DIY平台,DIY出属于你的个性作品;您也可以用它去参加比赛。总之,3PA小车是一个很好的学习和开发的平台,更多的功能等着你来开发哦。
试一试自己编写下面的几个有趣的机器人行为
![]() 购买 3PA轮式机器人套装 (SKU:ROB0044)
购买 3PA轮式机器人套装 (SKU:ROB0044)