6DOF机械臂180度旋转底座
<img alt="Dizuo 180.jpg" src="http://images.ncnynl.com/arduino/2016/Dizuo_180.jpg" width="600" height="636" />
先使用舵机控制器或单片机将舵机的角度都调整到90度。使码盘四个圆孔成正十字。

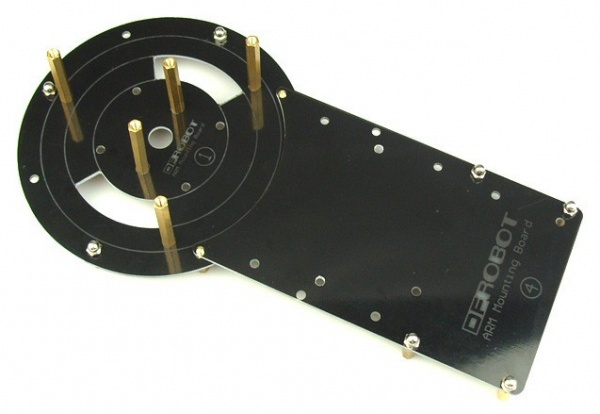
将标有1号的旋转盘找出来,在其下面安装三个M310的单头铜柱,上面用圆帽螺母拧好。

接着再1号盘上面的对应位置安装5个M330的单头铜柱,下面使用圆帽螺母固定好。

将标有4号的旋转盘找出来,在其下面对应位置安装4个M310的单头铜柱,上面用圆帽螺母固定好。
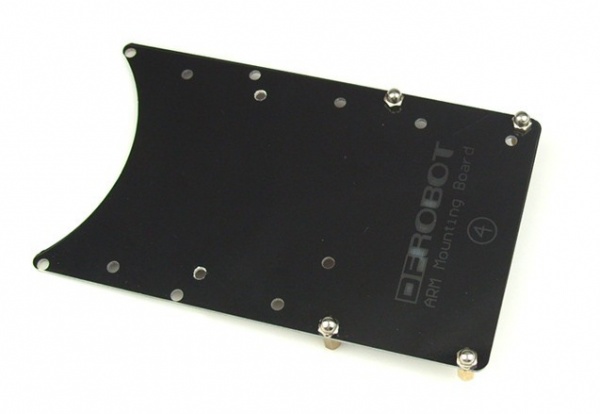
将4号盘放在1号盘对应位置,用2个M310的单头铜柱固定好,上面使用圆帽螺母固定好。

将3个M310的单头铜柱安装到4号盘上,下面使用圆帽螺母固定好。

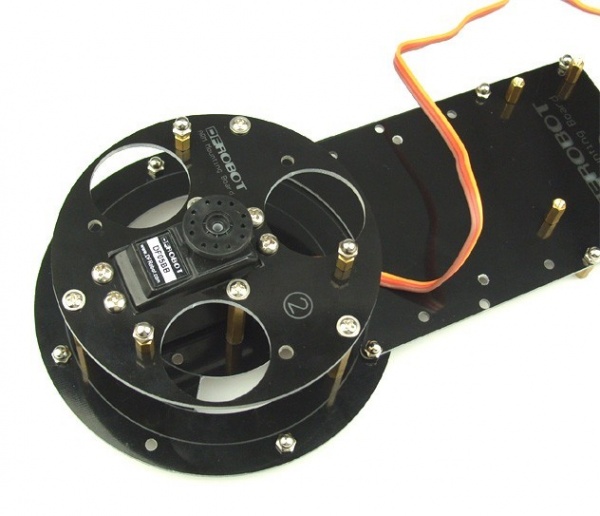
将一只调整好角度的DF05BB舵机从2号盘的下面穿到上面。

使用M48的螺丝将舵机安装在2号盘上。

在2号盘上安装3个M36的单头铜柱。

将M36的铜柱上拧上圆帽螺母,根据舵机盘的高度,可以调整圆帽螺母的高度。

将安装好的2号盘放到1号盘上,并使用螺丝固定好。
将3号盘找出,放在2号盘上,将各个孔的位置对应好。

![]() 购买 机械臂180度旋转底座 (SKU: ROB0038)
购买 机械臂180度旋转底座 (SKU: ROB0038)