图形化编程制作的避障、巡线小车
最近收到友人发来的一套开源硬件,试完了一下,还不错。编程是图形化的,比较简单实用。 硬件结构的基本形态——小车,功能上满足巡线和避障。
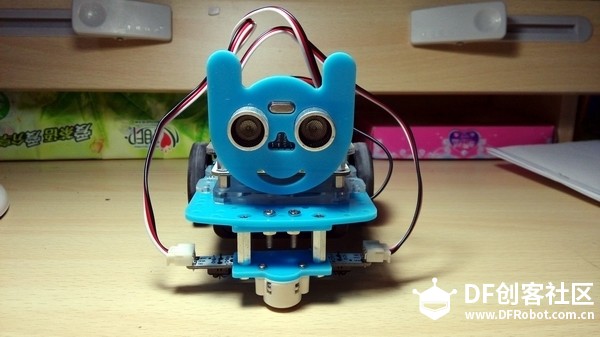
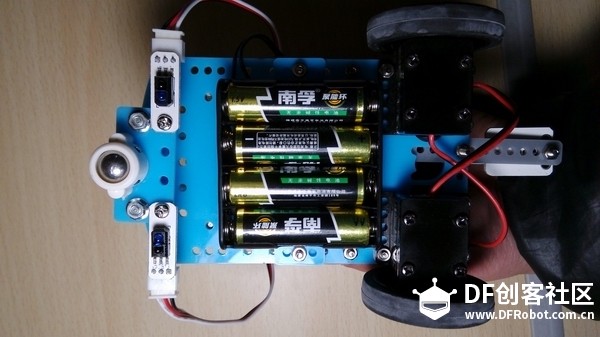
硬件结构搭建:超声波传感器、巡线传感器2只、电机2只,主控板、配件若干
IMG_20160110_173941.jpg (48.72 KB, 下载次数: 0)
下载附件
保存到相册
2016-1-10 18:08 上传
搭建好的正面
IMG_20160110_173955.jpg (54.15 KB, 下载次数: 0)
下载附件
保存到相册
2016-1-10 18:08 上传
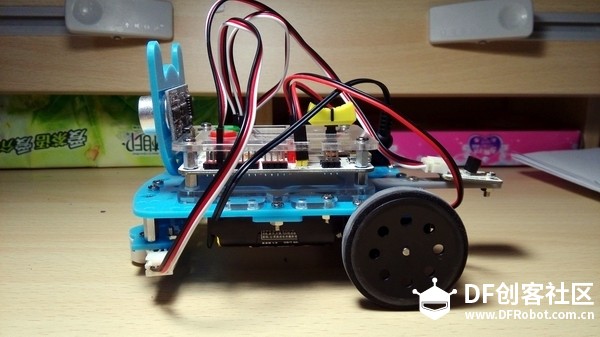
侧面
IMG_20160110_174011.jpg (53.4 KB, 下载次数: 0)
下载附件
保存到相册
2016-1-10 18:08 上传
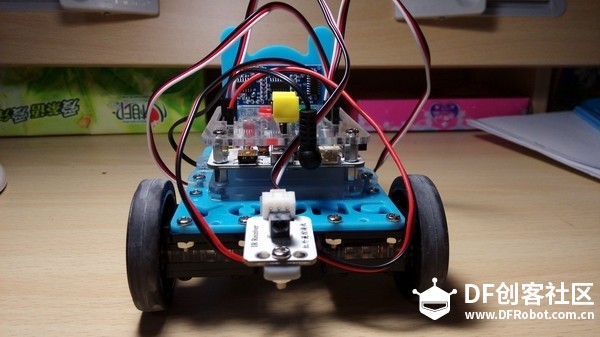
背面
IMG_20160110_174032.jpg (59.02 KB, 下载次数: 0)
下载附件
保存到相册
2016-1-10 18:08 上传
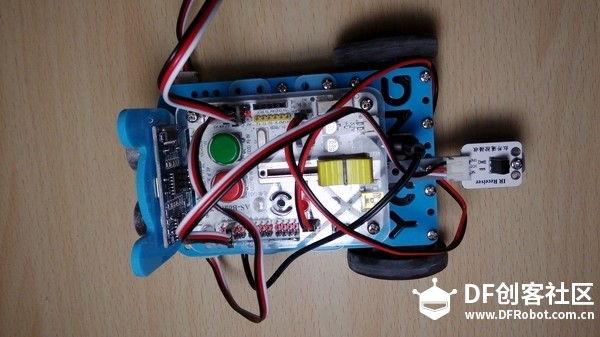
车顶
IMG_20160110_174051.jpg (53.39 KB, 下载次数: 0)
下载附件
保存到相册
2016-1-10 18:08 上传
车身
架构搭建比较简单,不再详细讲解。
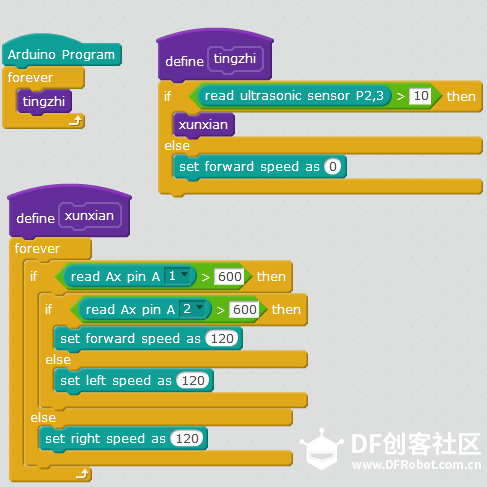
程序代码:
这里更是简单了,简单到拖拽几条积木指令。
应急停车图.png (40.57 KB, 下载次数: 0)
下载附件
保存到相册
2016-1-10 18:12 上传
其中:xuanxian子程序完成巡线功能,tingzhi子程序完成当超声波检测前方距离小于10时停车的功能。