Arduino/Genuino 101 入门教程四:processing玩转六轴数据
主要就是用processing对获取的六轴数据进行可视化处理。
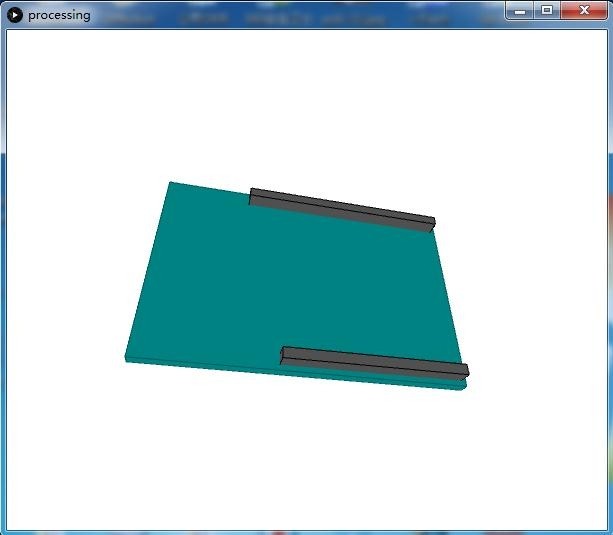
先看下效果:软件在电脑桌面虚拟化一个Arduino 101模型,当你转动手中的实体Arduino 101开发板的时候,桌面的模型也会跟着转动。(因为Yaw的数据没有电子罗盘的修正,模型会飘,这里注释掉对Yaw数据的读取会得到一个较好的体验,期待拿到DFRobot集成了电子罗盘的Inter Curie开发板)

1.png (228.36 KB, 下载次数: 0)
下载附件
保存到相册
2016-3-20 10:19 上传
操作步骤:
1.下载必要的软件,Processing (我下载的是Windows64位版本的)
下载地址:http://pan.baidu.com/s/1o6Taziy
官网下载地址(需翻墙):https://processing.org/
2.下载Arduino IDE 的代码到开发板,这里注释了对Yaw数据的获取:
/===============================================Example sketch for CurieIMU library for Intel(R) Curie(TM) devices.Copyright (c) 2015 Intel Corporation.All rights reserved.Based on I2C device class (I2Cdev) demonstration Arduino sketch for MPU6050class by Jeff Rowberg: https://github.com/jrowberg/i2cdevlib===============================================I2Cdev device library code is placed under the MIT licenseCopyright (c) 2011 Jeff RowbergPermission is hereby granted, free of charge, to any person obtaining a copyof this software and associated documentation files (the "Software"), to dealin the Software without restriction, including without limitation the rightsto use, copy, modify, merge, publish, distribute, sublicense, and/or sellcopies of the Software, and to permit persons to whom the Software isfurnished to do so, subject to the following conditions:The above copyright notice and this permission notice shall be included inall copies or substantial portions of the Software.THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS ORIMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THEAUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHERLIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS INTHE SOFTWARE.===============================================Genuino 101 CurieIMU Orientation VisualiserHardware Required: Arduino/Genuino 101Modified Nov 2015by Helena Bisby <support@arduino.cc>This example code is in the public domainhttp://arduino.cc/en/Tutorial/Genuino101CurieIMUOrientationVisualiser/#include <CurieIMU.h>#include <MadgwickAHRS.h>Madgwick filter; // initialise Madgwick objectint ax, ay, az;int gx, gy, gz;float yaw = 0.0;float pitch;float roll;int factor = 800; // variable by which to divide gyroscope values, used to control sensitivity// note that an increased baud rate requires an increase in value of factorint calibrateOffsets = 1; // int to determine whether calibration takes place or notvoid setup() {// initialize Serial communicationSerial.begin(9600);// initialize deviceCurieIMU.begin();if (calibrateOffsets == 1) { // use the code below to calibrate accel/gyro offset values Serial.println("Internal sensor offsets BEFORE calibration..."); Serial.print(CurieIMU.getAccelerometerOffset(X_AXIS)); Serial.print("\t"); Serial.print(CurieIMU.getAccelerometerOffset(Y_AXIS)); Serial.print("\t"); Serial.print(CurieIMU.getAccelerometerOffset(Z_AXIS)); Serial.print("\t"); Serial.print(CurieIMU.getGyroOffset(X_AXIS)); Serial.print("\t"); Serial.print(CurieIMU.getGyroOffset(Y_AXIS)); Serial.print("\t"); Serial.print(CurieIMU.getGyroOffset(Z_AXIS)); Serial.print("\t"); Serial.println(""); // To manually configure offset compensation values, use the following methods instead of the autoCalibrate...() methods below // CurieIMU.setGyroOffset(X_AXIS, 220); // CurieIMU.setGyroOffset(Y_AXIS, 76); // CurieIMU.setGyroOffset(Z_AXIS, -85); // CurieIMU.setAccelerometerOffset(X_AXIS, -76); // CurieIMU.setAccelerometerOffset(Y_AXIS, -235); // CurieIMU.setAccelerometerOffset(Z_AXIS, 168); //IMU device must be resting in a horizontal position for the following calibration procedure to work correctly! Serial.print("Starting Gyroscope calibration..."); CurieIMU.autoCalibrateGyroOffset(); Serial.println(" Done"); Serial.print("Starting Acceleration calibration..."); CurieIMU.autoCalibrateAccelerometerOffset(X_AXIS, 0); CurieIMU.autoCalibrateAccelerometerOffset(Y_AXIS, 0); CurieIMU.autoCalibrateAccelerometerOffset(Z_AXIS, 1); Serial.println(" Done"); Serial.println("Internal sensor offsets AFTER calibration..."); Serial.print(CurieIMU.getAccelerometerOffset(X_AXIS)); Serial.print("\t"); Serial.print(CurieIMU.getAccelerometerOffset(Y_AXIS)); Serial.print("\t"); Serial.print(CurieIMU.getAccelerometerOffset(Z_AXIS)); Serial.print("\t"); Serial.print(CurieIMU.getAccelerometerOffset(X_AXIS)); Serial.print("\t"); Serial.print(CurieIMU.getAccelerometerOffset(Y_AXIS)); Serial.print("\t"); Serial.print(CurieIMU.getAccelerometerOffset(Z_AXIS)); Serial.print("\t"); Serial.println("");}}void loop() {// read raw accel/gyro measurements from deviceCurieIMU.readMotionSensor(ax, ay, az, gx, gy, gz); // use function from MagdwickAHRS.h to return quaternionsfilter.updateIMU(gx / factor, gy / factor, gz / factor, ax, ay, az);// functions to find yaw roll and pitch from quaternions//yaw = filter.getYaw();roll = filter.getRoll();pitch = filter.getPitch();// print gyro and accel values for debugging only, comment out when running Processing/Serial.print(ax); Serial.print("\t");Serial.print(ay); Serial.print("\t");Serial.print(az); Serial.print("\t");Serial.print(gx); Serial.print("\t");Serial.print(gy); Serial.print("\t");Serial.print(gz); Serial.print("\t");Serial.println("");/if (Serial.available() > 0) { int val = Serial.read(); if (val == 's') { // if incoming serial is "s" Serial.print(yaw); Serial.print(","); // print comma so values can be parsed Serial.print(pitch); Serial.print(","); // print comma so values can be parsed Serial.println(roll); }}}复制代码
3.打开Processing软件:解压下载的Processing软件包,里面有个exe文件,双击运行,添加Processing程序:
import processing.serial.;Serial myPort;int newLine = 13; // new line character in ASCIIfloat yaw;float pitch;float roll;String message;String [] ypr = new String [3];void setup(){size(600, 500, P3D); /Set my serial port to same as Arduino, baud rate 9600/myPort = new Serial(this, Serial.list()[
2.jpg (26.04 KB, 下载次数: 0)
下载附件
保存到相册
2016-3-20 10:18 上传
OK,操作完毕,很简单吧,试试看!
我再来转一会玩玩:
3.jpg (25.37 KB, 下载次数: 0)
下载附件
保存到相册
2016-3-20 10:19 上传
看累了没,开心一刻:
一大学生被敌人抓了,敌人把他绑在了电线杆上,然后问他:说,你是哪里的?不说就电死你!大学生回了敌人一句话,结果被电死了,他说:我是电大的!
【Arduino/Genuino 101 入门教程】
Arduino 101 入门教程一:环境配置Arduino 101 入门教程二:获取加速度计和陀螺仪数据Arduino 101 入门教程三:姿态角Arduino 101 入门教程四:processing玩转六轴数据Arduino 101 入门教程五:蓝牙发送数据Arduino 101 入门教程六:蓝牙接收数据
- DF创客社区版权所有,欢迎转载。转载请务必标注来源: DF创客社区+作者姓名+原文网址。