DFLG6DOF 6自由度机械臂安装说明
<img alt="DFLG6DOF.jpg" src="http://images.ncnynl.com/arduino/2016/DFLG6DOF.jpg" width="600" height="346" />

所有舵机在使用前,都必须使用舵机控制器将角度调整到90度,使码盘4个圆孔成正十字。

安装HS422舵机


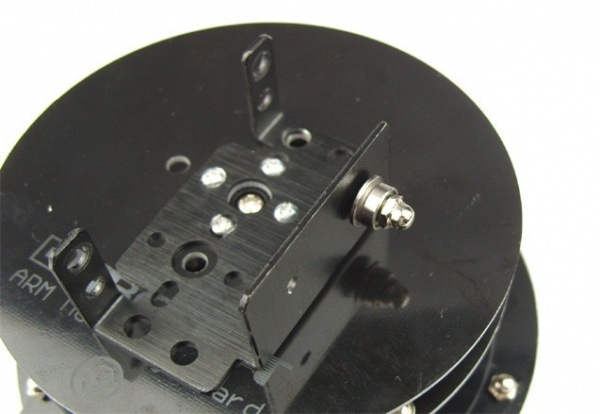
找出一个多功能舵机支架

使用4个2.3MM的自攻螺丝将多功能舵机支架安装在底座上。

将多功能舵机支架安装上杯士轴承,先将M310的螺丝穿过支架的孔,然后套上弹簧垫片。

然后再套上杯士轴承,并使用圆帽螺母固定好。
找出两个长U型支架。

将两个长U型支架使用2个M38的螺丝连接起来。

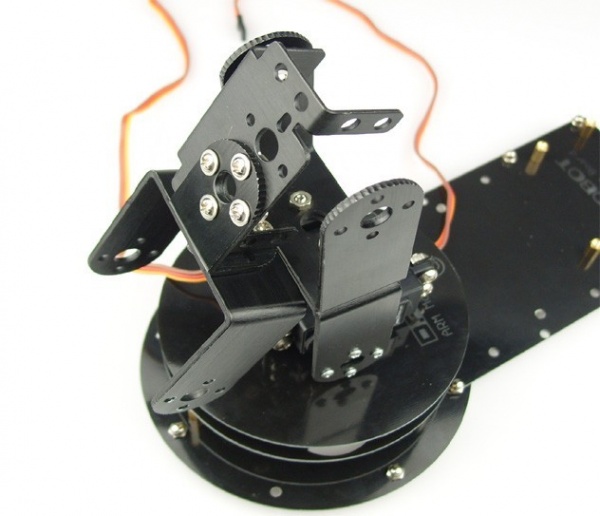
将两个连接好的长U型架安装到3号盘上的舵机支架上。

将调节好角度DF15MG舵机安装到舵机支架上。
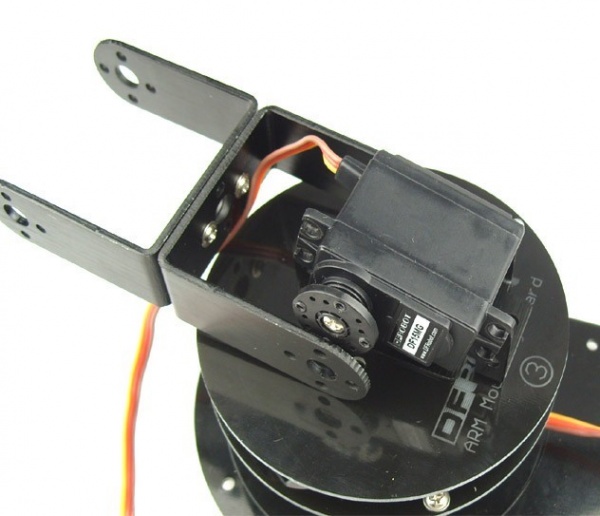
将长U型支架垂直放置,使用4个自攻螺丝安装好DF15MG舵机盘,再使用M48螺丝把舵机固定到舵机支架上。
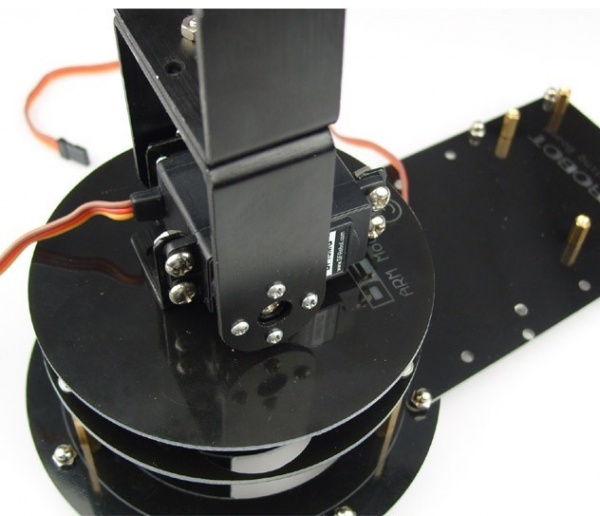
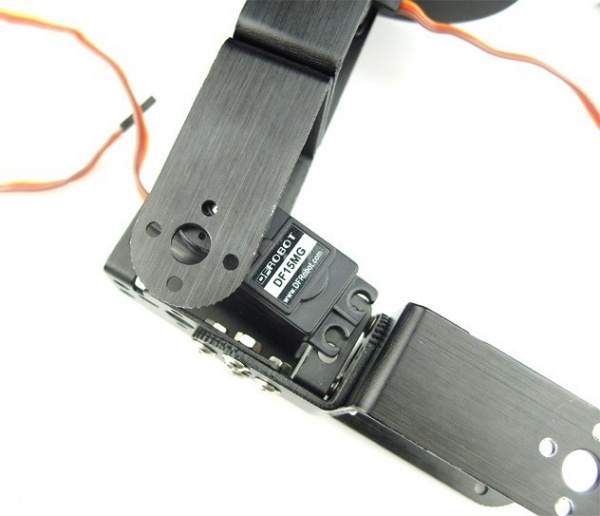
将长U型支架和L支架使用2颗M38螺丝连接起来。

再将舵机支架和L支架使用4颗M3*5螺丝连接起来。

舵机支架安装上杯士轴承。

连接好后放在之前安装好的长U型支架上。
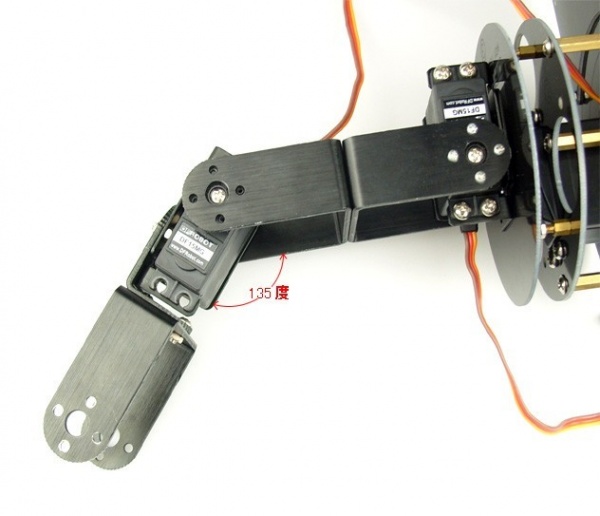
准备一个调整好角度的DF15MG舵机。
将舵机支架与长U型支架夹角张开135度与DF15MG舵机连接。

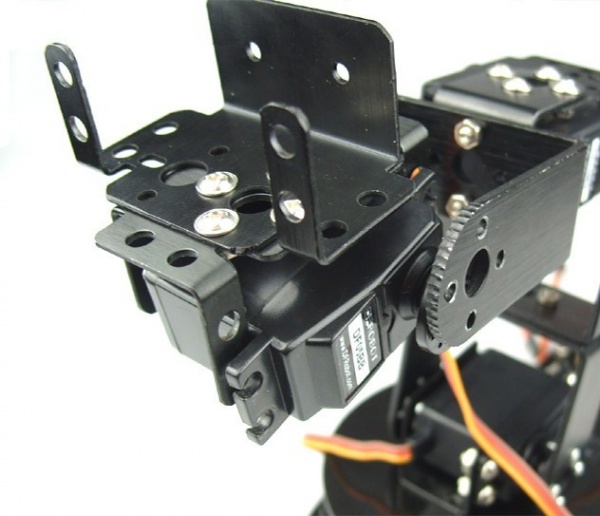
连接2个多功能舵机支架。

下面的多功能舵机支架安装好杯士轴承。

安装好后放在主体上。

准备一个调整好角度的DF05BB舵机,安装在上面。
安装夹持器,将夹持器张开到中间位置,把已经初始化好的HS311舵机安装到腕部。

安装第2个HS311舵机

把夹持器安装到机械臂上,就算大功告成!

![]() 购买 DFLG6DOF 6自由度机械臂(SKU:ROB0036)
购买 DFLG6DOF 6自由度机械臂(SKU:ROB0036)